









Journal of Agricultural Science and Technology ›› 2024, Vol. 26 ›› Issue (4): 106-113.DOI: 10.13304/j.nykjdb.2022.0951
• INTELLIGENT AGRICULTURE & AGRICULTURAL MACHINERY • Previous Articles
Ruifeng LI( ), Yunfu YANG, Yongfa YANG(), Yongshun YU
), Yunfu YANG, Yongfa YANG(), Yongshun YU
Received:2022-11-03
Accepted:2023-04-25
Online:2024-04-15
Published:2024-04-23
Contact:
Yongfa YANG
李锐风(), 杨云福, 杨永发(), 于永顺
通讯作者:
杨永发
作者简介:李锐风 E-mail:liruifeng___1@126.com;
基金资助:CLC Number:
Ruifeng LI, Yunfu YANG, Yongfa YANG, Yongshun YU. Rose Flower Detection and Feature Extraction Based on Machine Vision[J]. Journal of Agricultural Science and Technology, 2024, 26(4): 106-113.
李锐风, 杨云福, 杨永发, 于永顺. 基于机器视觉的玫瑰花检测与特征提取[J]. 中国农业科技导报, 2024, 26(4): 106-113.

Fig. 1 Effect picture of bilateral filtering of some parametersA:Original;B:N=5,δr=50,δs=50;C:N=15,δr=70,δs=70;D:N=25,δr=80,δs=80
像素数 Number of pixels | 2朵玫瑰花重叠 2 roses overlap | 3朵玫瑰花重叠 3 roses overlap | 4朵玫瑰花重叠 4 roses overlap |
|---|---|---|---|
最大值 Maximum/105 | 3.047 | 4.326 | 5.821 |
最小值 Minimum/105 | 1.925 | 2.823 | 4.328 |
Table 1 Pixels of overlapping area of roses
像素数 Number of pixels | 2朵玫瑰花重叠 2 roses overlap | 3朵玫瑰花重叠 3 roses overlap | 4朵玫瑰花重叠 4 roses overlap |
|---|---|---|---|
最大值 Maximum/105 | 3.047 | 4.326 | 5.821 |
最小值 Minimum/105 | 1.925 | 2.823 | 4.328 |
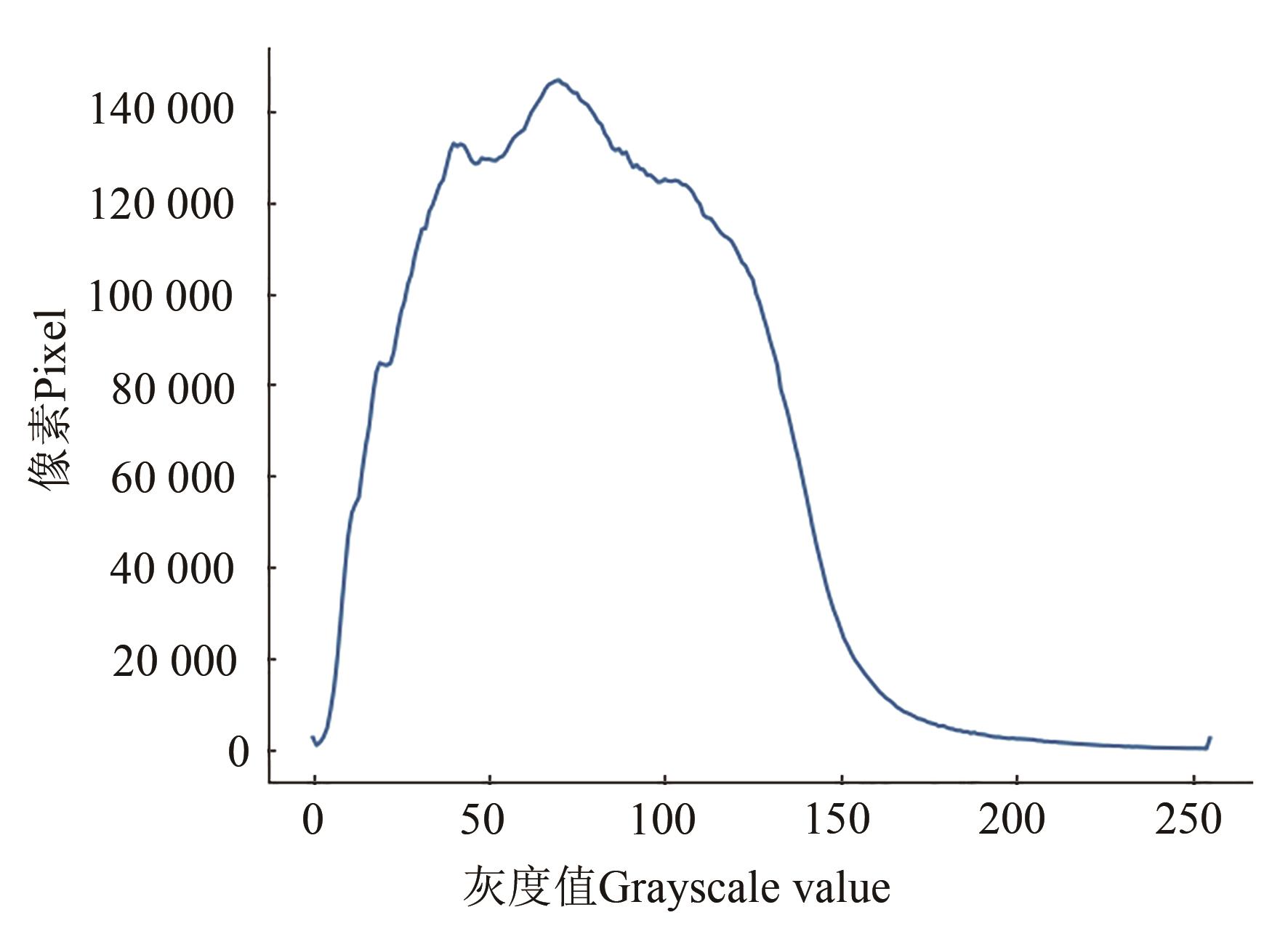
Fig. 2 Rose grayscale line chart

Fig. 3 Comparison of the thresholds for H, S, and V components individuallyA:Hue;B:Saturation;C:Value
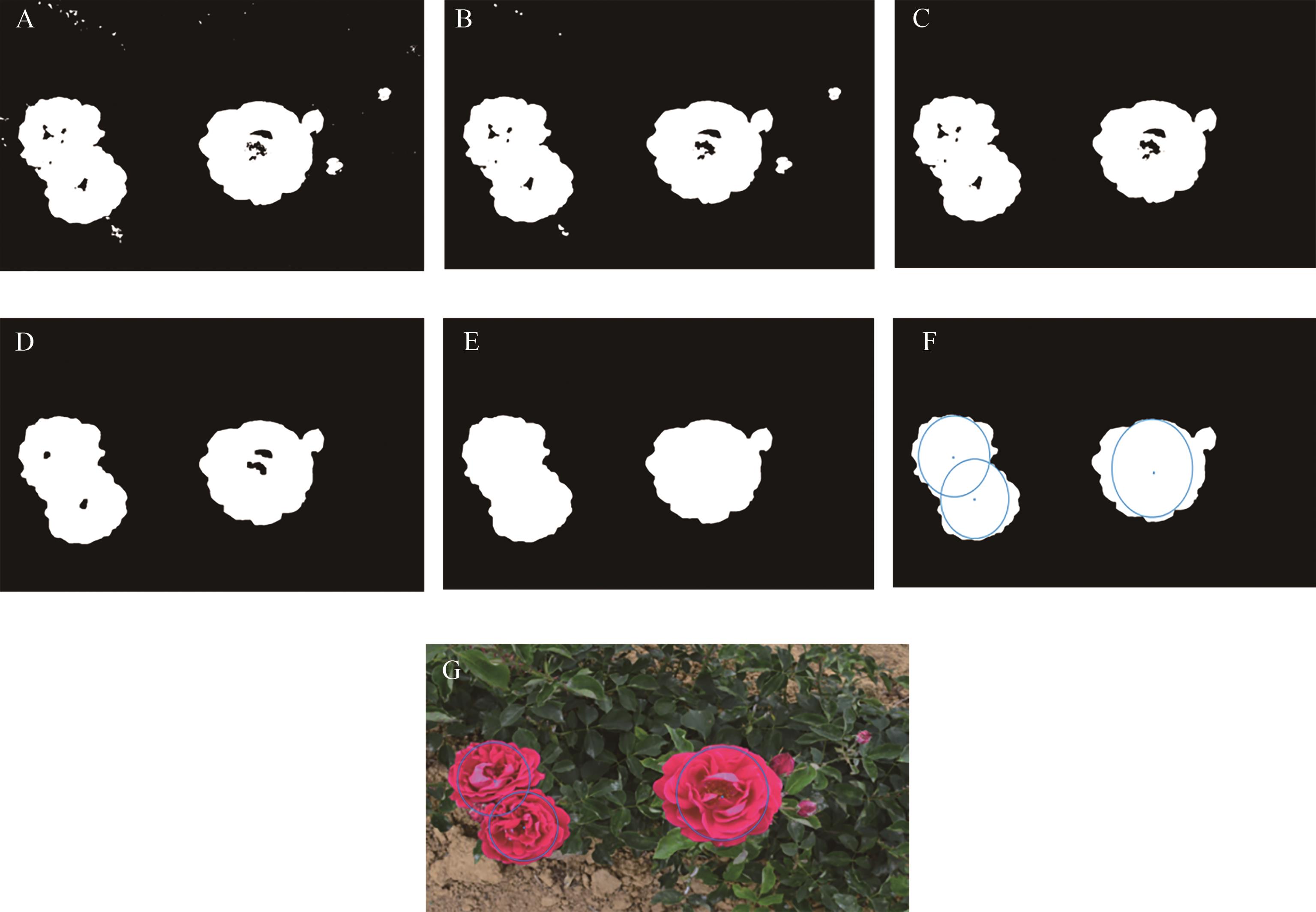
Fig. 4 Rose recognition processA:Color threshold image;B:Morphological opening; C:Area threshold; D: Morphological closing;E:Hole query and filling;F:Stamen positioning;G:Shapes are similar. The blue circle in the figure is the cut circle fitting the outside of rose
玫瑰花位置 Rose location | 圆心像素坐标 Circle center pixel coordinates | 内切圆直径/像素数 Cut circle diameter/number of pixels |
|---|---|---|
| 左上Top left | (417, 951) | 523.693 7 |
| 左下Bottom left | (593, 1 344) | 547.342 1 |
| 右侧Right | (1 810, 1 080) | 667.371 7 |
Table 2 Rose image features
玫瑰花位置 Rose location | 圆心像素坐标 Circle center pixel coordinates | 内切圆直径/像素数 Cut circle diameter/number of pixels |
|---|---|---|
| 左上Top left | (417, 951) | 523.693 7 |
| 左下Bottom left | (593, 1 344) | 547.342 1 |
| 右侧Right | (1 810, 1 080) | 667.371 7 |
参数 Parameter | 单朵玫瑰花 Single rose | 3朵及以下重叠 Overlap of 3 roses and below | 4朵及以上重叠 Overlapp 4 roses and above | 枝叶遮挡 Foliage obscuration |
|---|---|---|---|---|
类型数量 Number of types | 602 | 232 | 162 | 336 |
识别数量 Recognition quantity | 591 | 215 | 120 | 279 |
识别率 Recognition rate/% | 98.17 | 92.67 | 74.07 | 83.03 |
耗时/s Time consuming/s | 1 080 | 501 | 631 | 848 |
Table 3 Rose recognition statistical results
参数 Parameter | 单朵玫瑰花 Single rose | 3朵及以下重叠 Overlap of 3 roses and below | 4朵及以上重叠 Overlapp 4 roses and above | 枝叶遮挡 Foliage obscuration |
|---|---|---|---|---|
类型数量 Number of types | 602 | 232 | 162 | 336 |
识别数量 Recognition quantity | 591 | 215 | 120 | 279 |
识别率 Recognition rate/% | 98.17 | 92.67 | 74.07 | 83.03 |
耗时/s Time consuming/s | 1 080 | 501 | 631 | 848 |
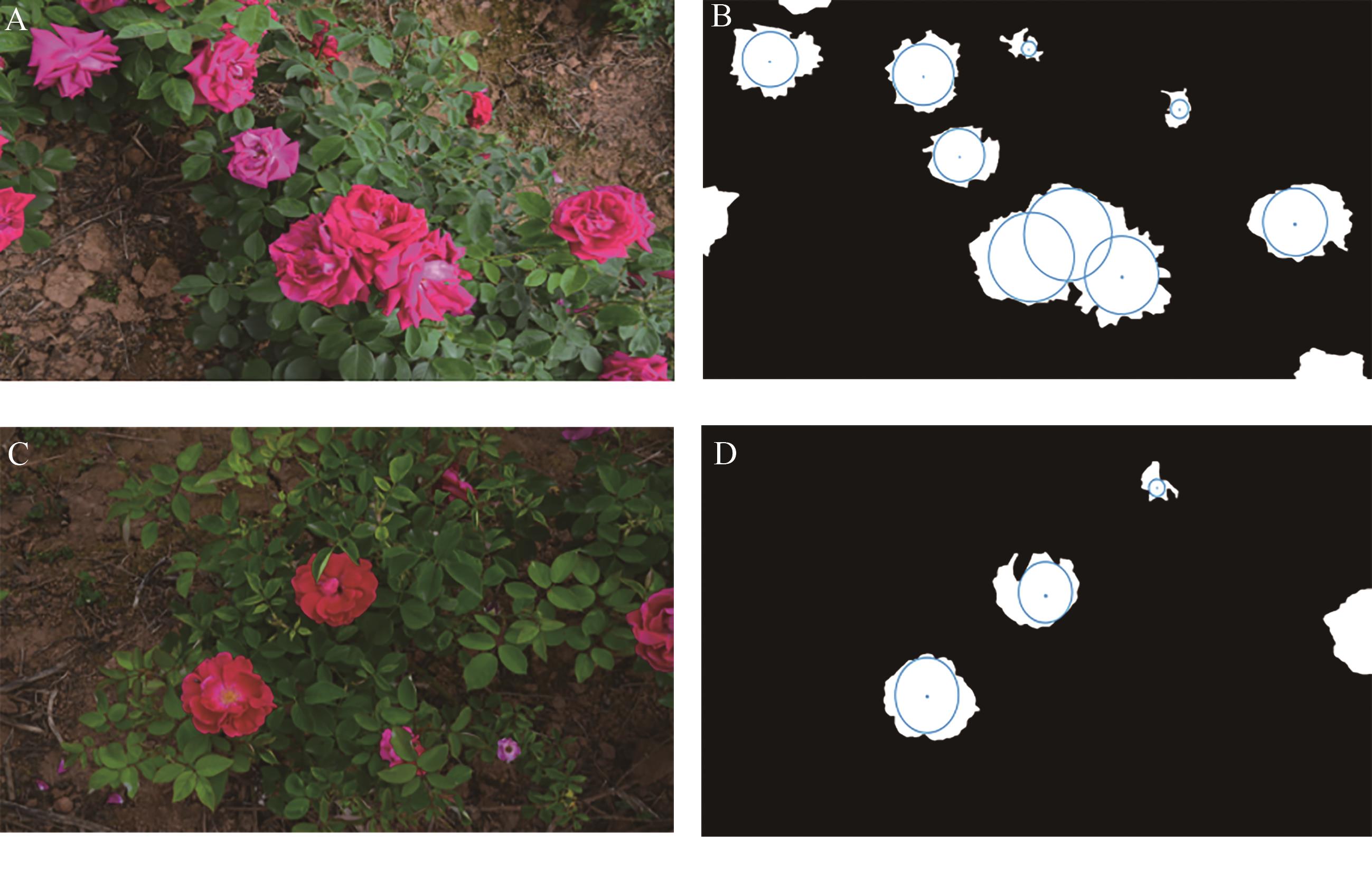
Fig. 5 Recognition results of roses in different natural lightA:Overlapping the original figure with a front light; B:Shunguang rose flower inscribed circle diagram; C: Backlit original diagram; D:Backlit rose flower inscribed circle chart. The blue circle in the figure is the cut circle fitting the outside of rose
| 1 | 陈昆,杨云福,方卫山,等.云南食用玫瑰花产业现状及发展研究[J].南方农机,2022,53(6):6-8. |
| CHEN K, YANG Y F, FANG W S,et al..Study on the current situation and development of edible roses production in Yunnan [J]. China Southern Agric. Mach., 2022,53(6):6-8. | |
| 2 | 胡晓燕,沈才洪,敖宗华,等.玫瑰花有效成分及玫瑰花酒的研究进展[J].酿酒科技,2014(11):68-72 |
| HU X Y, SHEN C H, AO Z H,et al..Research progress in the active ingredients of rose & rose wine [J].Liquor-Making Sci. Technol., 2014(11):68-72. | |
| 3 | 王彦钧.食用玫瑰花采摘机器人研究[D].昆明:昆明理工大学,2014. |
| WANG Y J.Study on picking robots for ediable rose [D]. Kunming: Kunming University of Science and Technology,2014. | |
| 4 | 王彦钧,张云伟,王大龙,等.基于神经网络的食用玫瑰花图像识别算法[J].中国农业大学学报,2014,19(4):180-186. |
| WANG Y J, ZHANG Y W, WANG D L,et al..Recognition algorithm of edible rose image based on neural network [J].J. China Agric. Univ., 2014,19(4):180-186. | |
| 5 | 姚应方,刘峰,张海东,等.基于机器视觉的八角颜色与果形识别研究[J].中国农业科技导报,2021,23(11):110-120. |
| YAO Y F, LIU F, ZHANG H D, et al.. Research on octagon color and fruit shape recognition based on machine vision [J]. J. Agric. Sci. Technol., 2021,23(11):110-120. | |
| 6 | 司永胜,乔军,刘刚,等.基于机器视觉的苹果识别和形状特征提取[J].农业机械学报,2009,40(8):161-165. |
| SI Y S, QIAO J, LIU G,et al..Recognition and shape features extraction of apples based on machine vision [J].Trans. Chin. Soc. Agric. Mach.,2009,40(8):161-165. | |
| 7 | 祝前峰,陆荣鑑,李奉顺.苹果采摘机械的研究现状与发展趋势[J].林业机械与木工设备,2021,49(5):4-9. |
| ZHU Q F, LU R J, LI F S.Research status and development trend of apple picking machinery [J].For. Mach. Woodworking Equip., 2021,49(5):4-9. | |
| 8 | 任会.基于机器视觉的自然条件下橘子检测研究[D].长沙:中南林业科技大学,2021. |
| REN H.Study on orange detection under natural conditions based on machine vision [D].Changsha:Central South University of Forestry and Technology,2021. | |
| 9 | 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3):163-167. |
| WANG H Q, JI C Y, GU B X,et al..In-greenhouse cucumber recognition based on machine vision and least squares support vector machine [J].Trans. Chin. Soc. Agric. Mach.,2012,43(3):163-167. | |
| 10 | 鲍官军,荀一,戚利勇,等.机器视觉在黄瓜采摘机器人中的应用研究[J].浙江工业大学学报,2010,38(1):114-118. |
| BAO G J, XUN Y, QI L Y,et al..Research on the application of machine vision in cucumber picking robots [J].Zhejiang Univ.Technol.,2010,38(1):114-118. | |
| 11 | TOMASI C, MANDUCHI R. Bilateral filtering for gray and color images [C]// Proceedings of the Sixth International Conference on Computer Vision. IEEE, 1998: 839-846. |
| 12 | 汪杰,陈曼龙,李奎,等.基于HSV与形状特征融合的花椒图像识别[J].中国农机化学报,2021,42(10):180-185. |
| WANG J, CHEN M L, LI K,et al..Prickly ash image recognition based on HSV and shape feature fusion [J]. J. Chin. Agric. Mech.,2021,42(10):180-185. | |
| 13 | 刘志伟,周东傲,林嘉宇.基于图像显著性检测的图像分割[J].计算机工程与科学,2016,38(1):144-147. |
| LIU Z W, ZHOU D A, LIN J Y. Image segmentation based on saliency detection [J].Comput. Eng. Sci., 2016,38(1):144-147. | |
| 14 | 王滨.猕猴桃采摘机器人目标果实空间坐标获取方法的研究[D].杨凌:西北农林科技大学,2016. |
| WANG B. A method for obtaining target fruit coordinates in space using on kiwifruit picking robot [D].Yangling:Northwest A&F University,2016. | |
| 15 | 王伟斌.采摘机器人目标识别及定位研究[D].西安:西安理工大学,2017. |
| WANG W B. Picking robot target identification and positioning research [D]. Xi’an: Xi’an University of Technology, 2017. | |
| 16 | HU M H, DONG Q L, MALAKAR P K,et al..Determining banana size based on computer vision [J]. Int. J. Food Prop.,2015,18(3):508-520. |
| 17 | 伍蓥芮,张志勇.基于图像处理技术的棚室番茄果实识别[J].山西农业科学,2021,49(7):898-902. |
| WU Y R, ZHANG Z Y. College of agricultural engineering tomato fruit recognition in greenhouse based on image processing technology [J]. J. Shanxi Agric. Sci., 2021,49(7):898-902. | |
| 18 | 张猛.基于网络摄像头的人脸识别系统设计[D].西安:西安电子科技大学,2020. |
| ZHANG M. Design of face recognition system based on web camera [D]. Xi’an:Xidian University,2020. | |
| 19 | 余博文.数字图像阈值分割研究与应用[J].科学技术创新,2021(19):91-92. |
| YU B W. Research and application of digital image threshold segmentation [J]. Sci. Technol. Innov., 2021(19):91-92. |
| [1] | Tingting CAO, Chun LIU, Youwei FAN, Li MA, Zhiyu REN, Suxia YUAN, Junyun ZHANG, Zunyao QIAN, Guangzhao YANG. Effects of Different Nitrogen Supply Level on Plant Growth and Development in Miniature Potted Rose [J]. Journal of Agricultural Science and Technology, 2024, 26(2): 67-79. |
| [2] | Ning ZHAO, Xing LI, Yong JIANG, Zhixiu WANG, Yulin BI, Guohong CHEN, Hao BAI, Guobin CHANG. Application of Image Recognition Technology in the Field of Chicken Breeding [J]. Journal of Agricultural Science and Technology, 2023, 25(9): 13-22. |
| [3] | Zhaoyang LIU, Yongqiang WANG, Congling ZHOU, Siqi QIANG. Research on Intelligent Control Method of Feeding System in Outdoor Breeding Pond [J]. Journal of Agricultural Science and Technology, 2023, 25(5): 123-130. |
| [4] | Zhiying XIONG, Rui YU, Ziyi HU, Yuman ZHANG, Qinglin LIU. Research Progress on Flowering Regulation and Flower Morphogenesis of Rose [J]. Journal of Agricultural Science and Technology, 2023, 25(2): 68-75. |
| [5] | Yantong ZHANG, Qianmin SU. Image Recognition of Corn Disease Based on Transfer Learning [J]. Journal of Agricultural Science and Technology, 2023, 25(10): 119-125. |
| [6] | Haitao LIU, Xin HAN, Yubin LAN, Lili YI, Baoju WANG, Lihua CUI. Precise Recognition Method of Cotton Top Buds Based on YOLOv4 Network [J]. Journal of Agricultural Science and Technology, 2022, 24(8): 99-108. |
| [7] | Jianwei WU, Jie HUANG, Xiaofei XIONG, Han GAO, Xiangyang QIN. Research and Application of Intelligent Recognition Method of Peach Tree Diseases Based on AI [J]. Journal of Agricultural Science and Technology, 2022, 24(5): 111-118. |
| [8] | Hao HUANG, Shengqiao XIE, Du CHEN, Heng WANG. Application and Research Advances on Deep Learning in Apple’s Industry Chain [J]. Journal of Agricultural Science and Technology, 2022, 24(10): 79-89. |
| [9] | ZHANG Nana§, LI Shuangmin§, WEN Xiaolei, FENG Lina, WANG Junfeng, YANG Wenjie, HUO Jiahuan, LAN Shuhui, SUN Weiming, QI Huixia. Identification and Biological Characteristics of the Pathogen Causing Pink Disease of Chestnut [J]. Journal of Agricultural Science and Technology, 2021, 23(7): 145-152. |
| [10] | ZHOU Huiru, WU Boming. Advances in Research on Deep Learning for Crop Disease Image Recognition [J]. Journal of Agricultural Science and Technology, 2021, 23(5): 61-68. |
| [11] | YAO Yingfang, LIU Feng, ZHANG Haidong, LI Chao, ZHOU Haijun, WANG Man. Research on Octagon Color and Fruit Shape Recognition Based on Machine Vision [J]. Journal of Agricultural Science and Technology, 2021, 23(11): 110-120. |
| [12] | SHI Ruiyao, TIAN Youwen*, LAI Xingtao, GU Wenjun. Development of Apple Intelligent On-line Inspection and Classification System Based on Machine Vision [J]. Journal of Agricultural Science and Technology, 2018, 20(3): 80-86. |
| [13] | YANG Quannv, ZHOU Quanju, WANG Yunbo*, HONG Yu, ZHANG Min, NONG Huazhan, HUANG Chaohong. Establishment of NIRS Models for the Content of Glucose, Fructose and Sucrose in Sweet Corn [J]. Journal of Agricultural Science and Technology, 2018, 20(1): 137-146. |
| [14] | WANG Yi, YAN Zhiyong*. Detection System of Chlorophyll Content of Cyclobalanopsis glauca Using Image Processing Technology [J]. Journal of Agricultural Science and Technology, 2017, 19(4): 59-64. |
| [15] | XIA Xue, QIU Yun*, WANG Jian, HU Lin, CUI Yunpeng, FAN Jingchao, GUO Xiuming, ZHOU Guomin*. Research Status and Prospect of Apple Detection and Localization Methods under Orchard Enviroment [J]. Journal of Agricultural Science and Technology, 2017, 19(2): 65-74. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
 京公网安备11010802021197号
京公网安备11010802021197号