









中国农业科技导报 ›› 2022, Vol. 24 ›› Issue (11): 97-111.DOI: 10.13304/j.nykjdb.2021.0619
贾鑫1( ), 谢铌1, 丁小兵2, 刘良豪2, 刘妤1()
), 谢铌1, 丁小兵2, 刘良豪2, 刘妤1()
收稿日期:2021-07-27
接受日期:2021-11-22
出版日期:2022-11-15
发布日期:2022-11-29
通讯作者:
刘妤
作者简介:贾鑫 E-mail:jx@stu.cqut.edu.cn;
基金资助:
Xin JIA1(), Ni XIE1, Xiaobing DING2, Lianghao LIU2, Yu LIU1()
Received:2021-07-27
Accepted:2021-11-22
Online:2022-11-15
Published:2022-11-29
Contact:
Yu LIU
摘要:
丘陵山区特殊的作业环境影响履带车辆的机动性能,建立履带车辆软坡路面稳态转向理论模型,探讨坡角、转向半径、转向角度和土壤环境等因素对山地履带车辆转向性能的影响。结果表明:基于动力学模型的数值分析与基于RecurDyn模型的仿真分析表现出较为一致的转向特性,这说明所建立的履带车辆软坡路面转向模型准确度较高;偏移量和滑移率随坡角及转向半径的变化趋势相反;牵引力、制动力、转向驱动力矩和阻力矩随坡角及转向半径的变化趋势一致,随转向角度在[0,360°)内呈现周期性变化;履带车辆在转向半径越大、坡角越平缓的情况下越易于实现转向运动,土壤环境是影响履带车辆转向特性的显著因素。研究结果可为履带车辆转向系统设计及其软坡路面转向特性分析提供参考。
中图分类号:
贾鑫, 谢铌, 丁小兵, 刘良豪, 刘妤. 山地履带车辆软坡路面稳态转向模型建立及验证[J]. 中国农业科技导报, 2022, 24(11): 97-111.
Xin JIA, Ni XIE, Xiaobing DING, Lianghao LIU, Yu LIU. Establishment and Verification of Steady-State Steering Model for Mountain Tracked Vehicle on Soft Slope Road[J]. Journal of Agricultural Science and Technology, 2022, 24(11): 97-111.
图1 履带底盘坡地转向坐标系
Fig. 1 Coordinate system for crawler chassis slope steering
图2 履带车辆坡地转向运动模型
Fig. 2 Steering motion model of tracked vehicle on slope road
图3 履带车辆坡地转向受力分析
Fig. 3 Force analysis of tracked vehicles turning on slope road
图4 履带车辆速度分析
Fig. 4 Speed analysis of tracked vehicle
图5 履带车辆接地段划分
Fig. 5 Division of grounding segment for tracked vehicles
图6 数值迭代法的计算流程
Fig. 6 Calculation process of numerical iteration method
图7 小型山地履带底盘结构
Fig.7 Structure and simulation model of the small crawler chassis
| 参数 Parameter | 值 Value | 参数 parameter | 值 Value |
|---|---|---|---|
| 车体质量 Body weight/kg | 571.5 | 驱动轮半径 Drive wheel radius/mm | 119 |
| 惰轮半径 Idler radius/mm | 115 | 轨距 Track gauge/mm | 852 |
| 单条履带宽度 Width of single track/mm | 149 | 支撑区段长度 Length of support section/mm | 1 098 |
表1 履带底盘基本参数
Table 1 Basic parameter of crawler chassis
| 参数 Parameter | 值 Value | 参数 parameter | 值 Value |
|---|---|---|---|
| 车体质量 Body weight/kg | 571.5 | 驱动轮半径 Drive wheel radius/mm | 119 |
| 惰轮半径 Idler radius/mm | 115 | 轨距 Track gauge/mm | 852 |
| 单条履带宽度 Width of single track/mm | 149 | 支撑区段长度 Length of support section/mm | 1 098 |
图8 驱动轮转速设定
Fig. 8 Speed setting of the driving wheel
| 参数 Parameter | 干沙土 Dry sandy soil | 砂质腐殖土 Humus soil | 黏性土 Cohesive soil |
|---|---|---|---|
| 含水量 Water content/% | 0 | 15 | 38 |
| Kc /[kN·m-(n+1)] | 0.95 | 5.27 | 13.19 |
| c/kPa | 1.04 | 1.72 | 4.14 |
| Kϕ /[kN·m-(n+2)] | 1 528.43 | 1 515.04 | 692.15 |
| K/mm | 25 | 25 | 25 |
| n | 1.1 | 0.7 | 0.5 |
| φ/deg | 28 | 29 | 13 |
表2 不同土壤基本参数[21]
Table 2 Basic parameters of different soils[21]
| 参数 Parameter | 干沙土 Dry sandy soil | 砂质腐殖土 Humus soil | 黏性土 Cohesive soil |
|---|---|---|---|
| 含水量 Water content/% | 0 | 15 | 38 |
| Kc /[kN·m-(n+1)] | 0.95 | 5.27 | 13.19 |
| c/kPa | 1.04 | 1.72 | 4.14 |
| Kϕ /[kN·m-(n+2)] | 1 528.43 | 1 515.04 | 692.15 |
| K/mm | 25 | 25 | 25 |
| n | 1.1 | 0.7 | 0.5 |
| φ/deg | 28 | 29 | 13 |
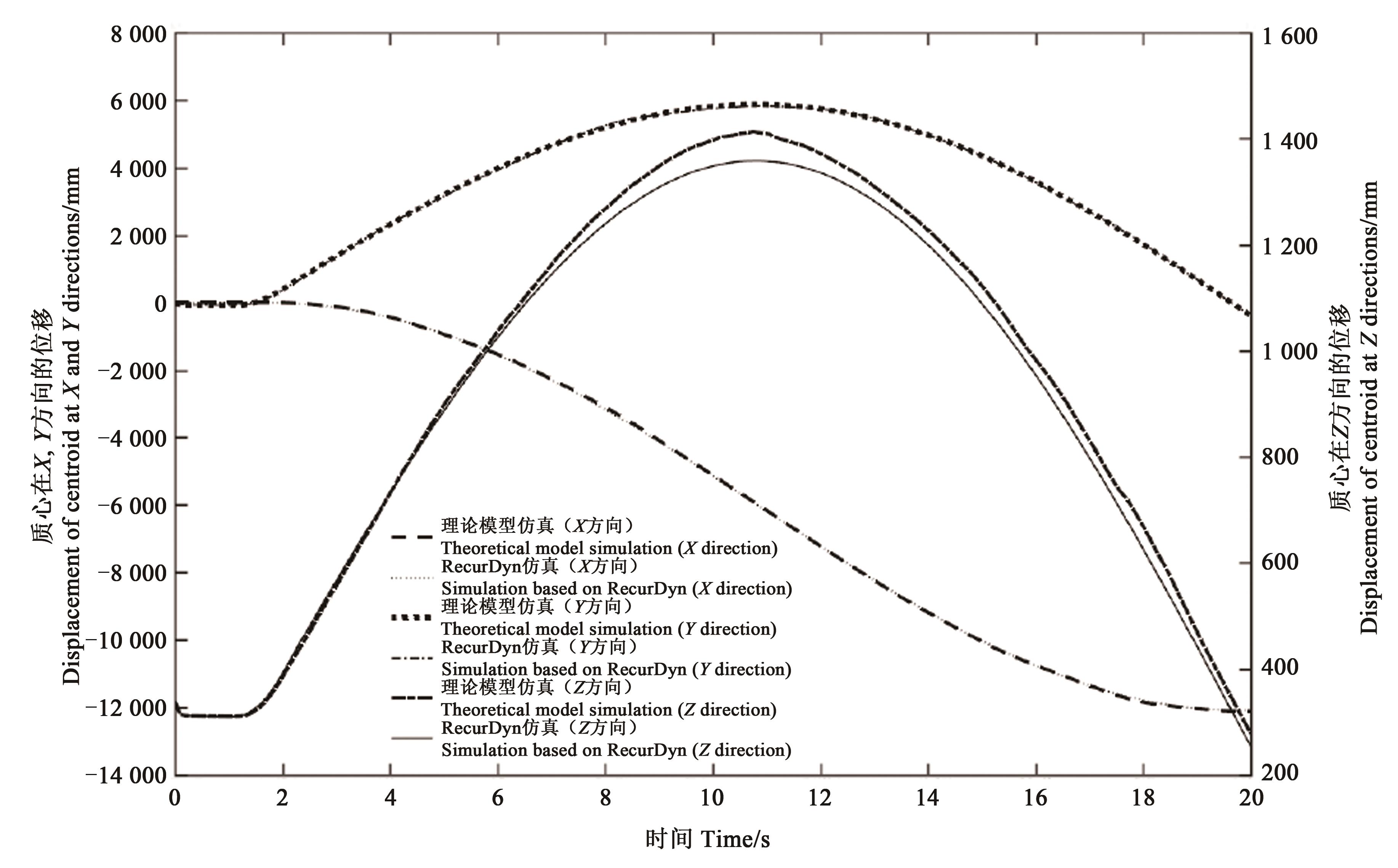
图9 质心位移数值分析与仿真分析结果对比
Fig. 9 Comparison of results of numerical analysis and simulation analysis of centroid displacement

图10 质心在X 和Y 方向的位移
Fig. 10 Displacement of the center of mass at the X & Y direction
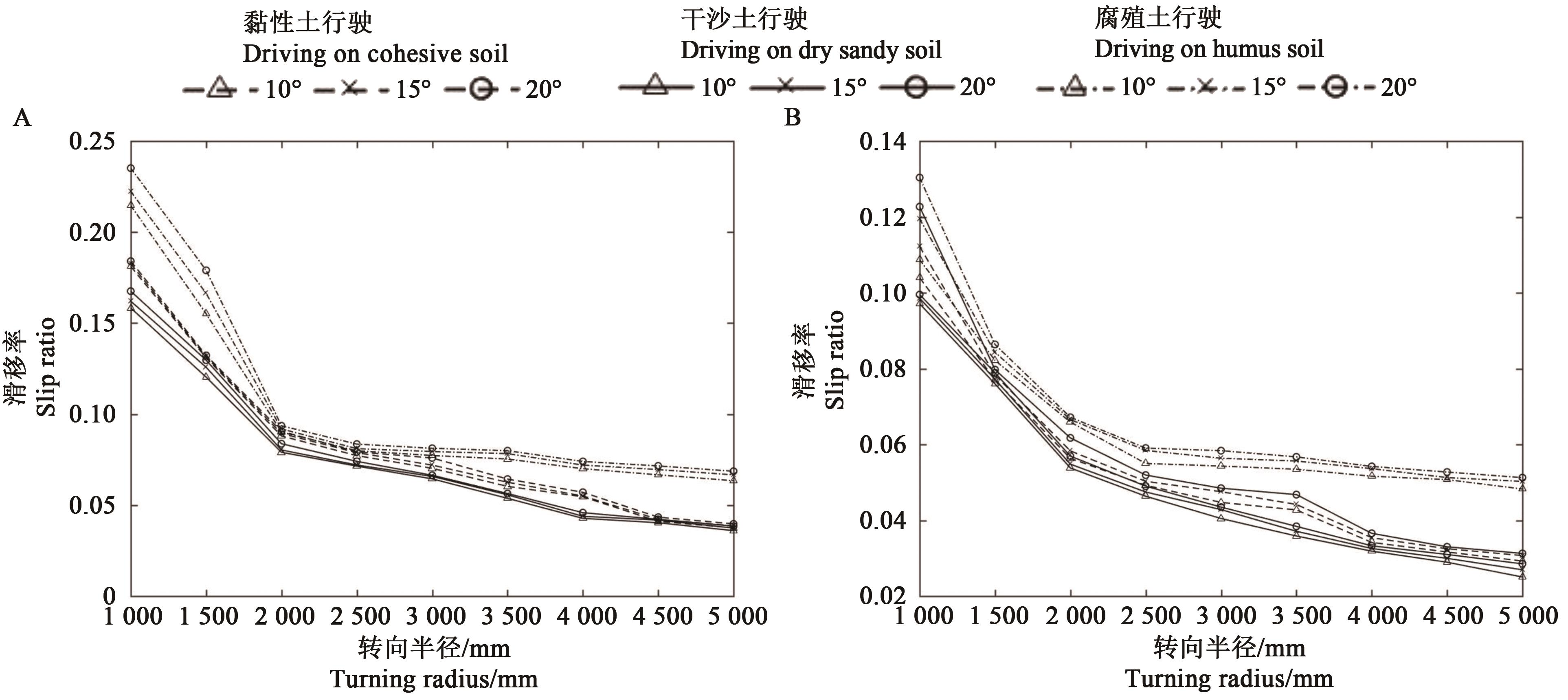
图11 滑移率随坡角、转向半径和土壤环境的变化A:δ1-α-R-土壤环境;B:δ2-α-R-土壤环境
Fig. 11 Change of the slip rate with slope angle, turning radius and soil environmentA:δ1-α-R-soil environment;B:δ2-α-R-soil environment
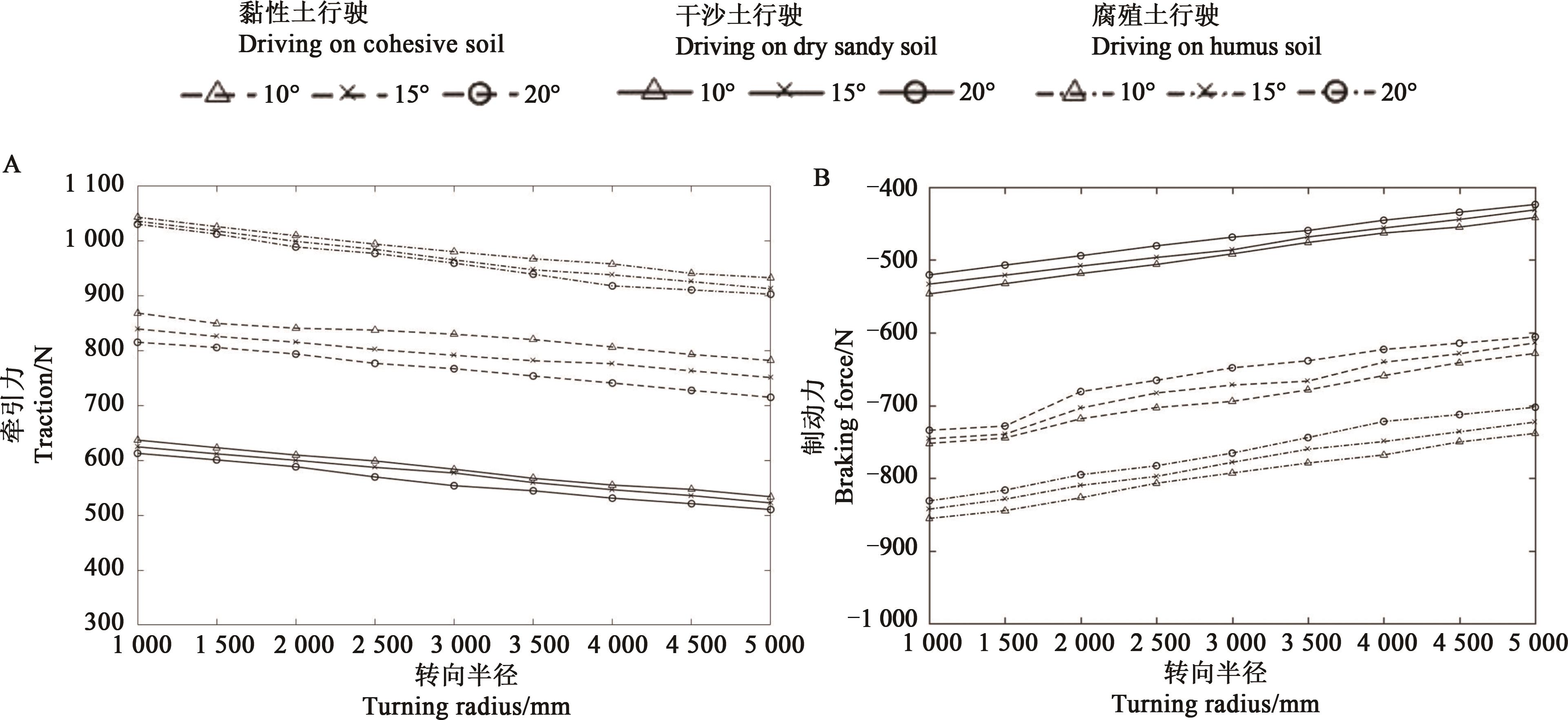
图12 牵引力和制动力随坡角、转向半径和土壤环境的变化A:Fy2-α-R-土壤环境;B:Fy1-α-R-土壤环境
Fig. 12 Change of the traction and braking force with slope angle, turning radius and soil environmentA:Fy2-α-R-soil environment;B:Fy1-α-R-soil environment
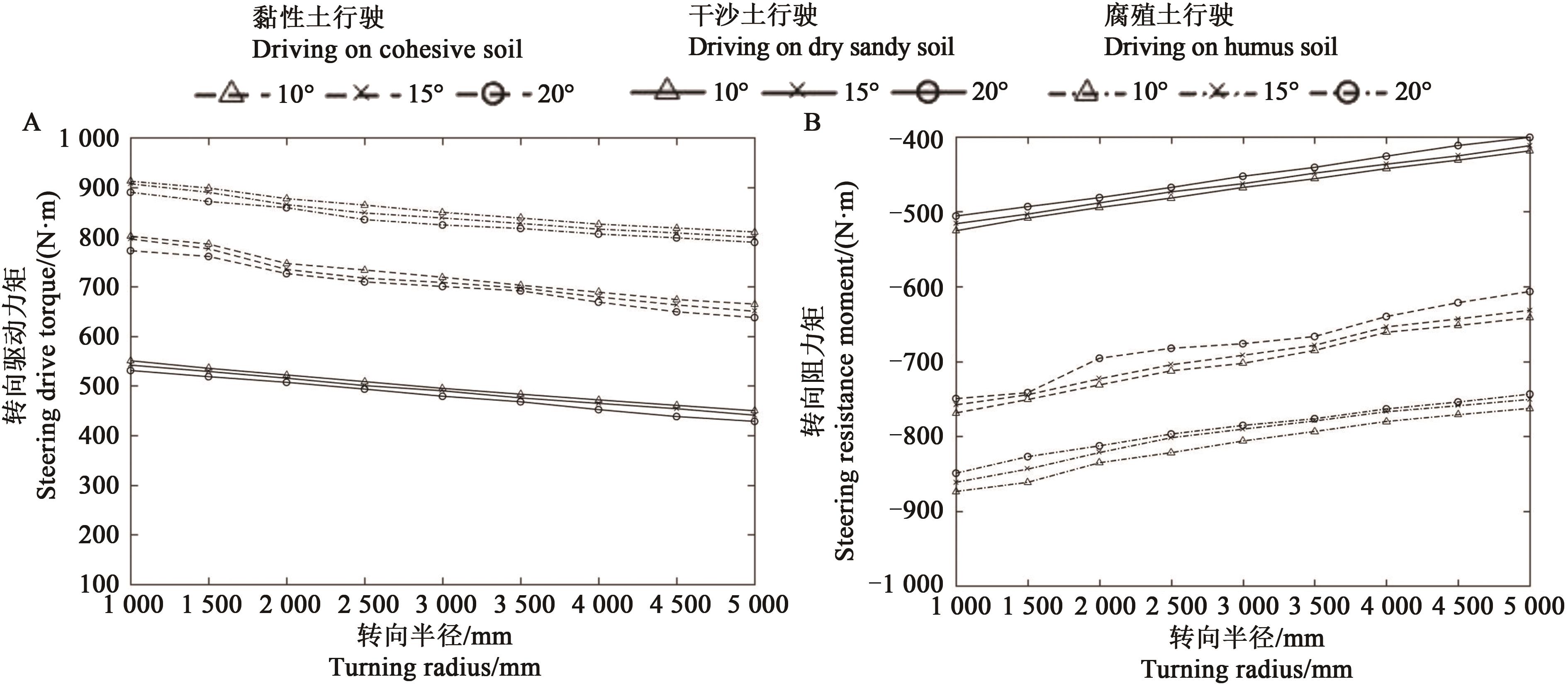
图13 转向驱动力矩和阻力矩随坡角、转向半径和土壤环境的变化A:MT -α-R-土壤环境;B:MR -α-R-土壤环境
Fig. 13 Change of the steering drive torque and resistance torque with the slope angle, steering radius and soil environmentA:MT -α-R-soil environment;B:MR -α-R-soil environment
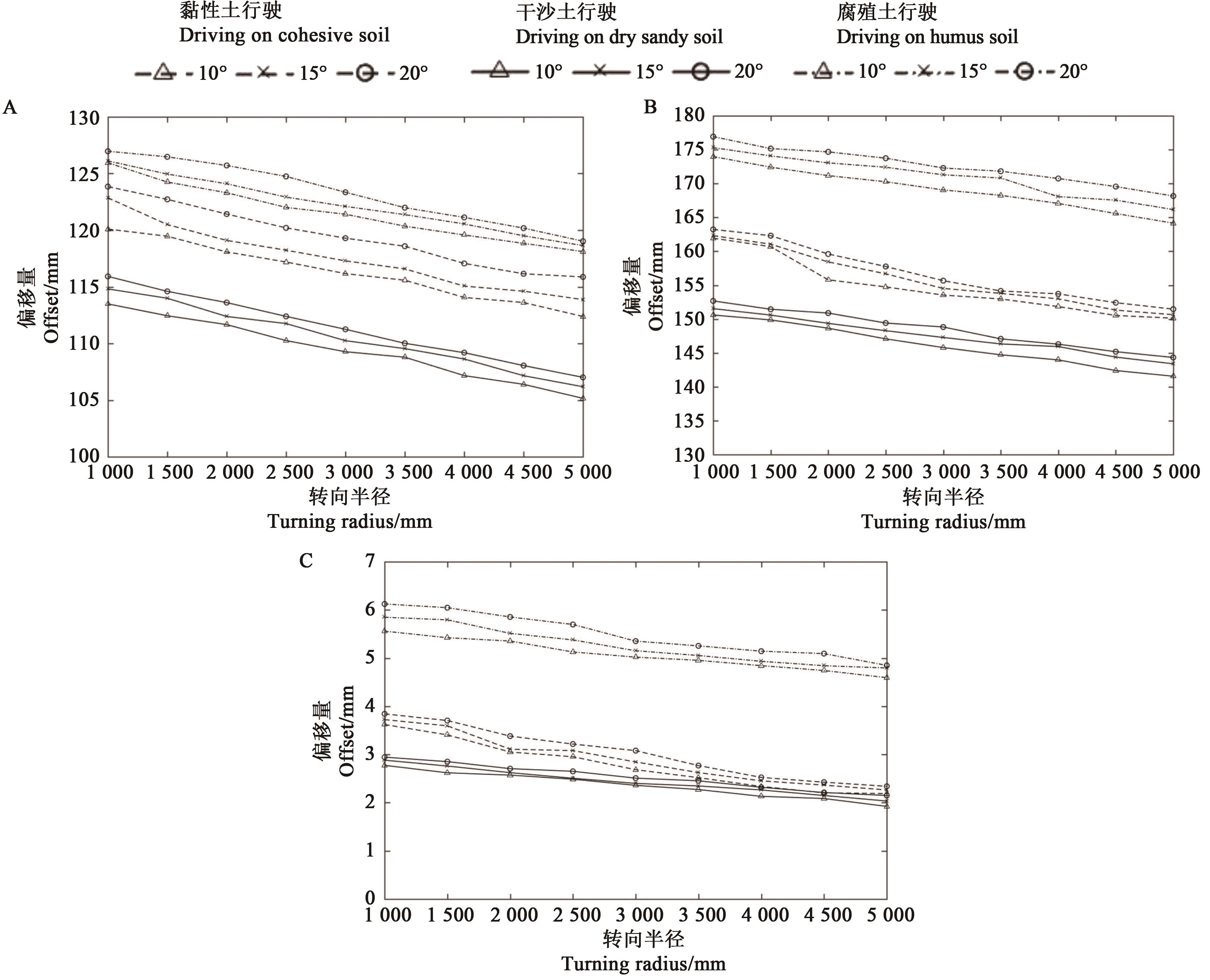
图14 偏移量随坡角、转向半径和土壤环境的变化A:A1-α-R-土壤环境;B:A2-α-R-土壤环境;C:D0-α-R-土壤环境
Fig. 14 Change of the offset with slope angle, turning radius and soil environmentA:A1-α-R-soil environment;B:A2-α-R-soil environment;C:D0-α-R-soil environment
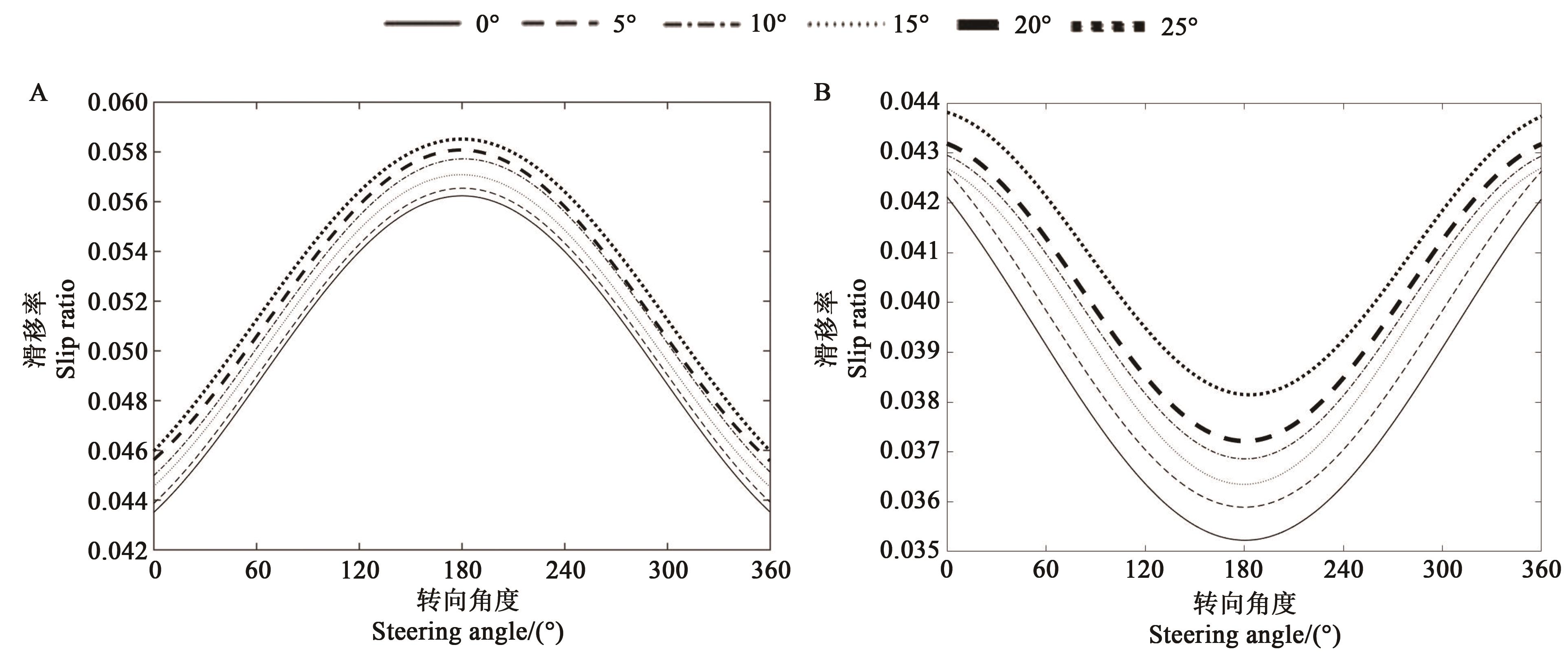
图15 滑移率随坡角和转向角度的变化A:δ1-α-φ;B:δ2-α-φ
Fig. 15 Change of the slip rate with slope angle and steering angle
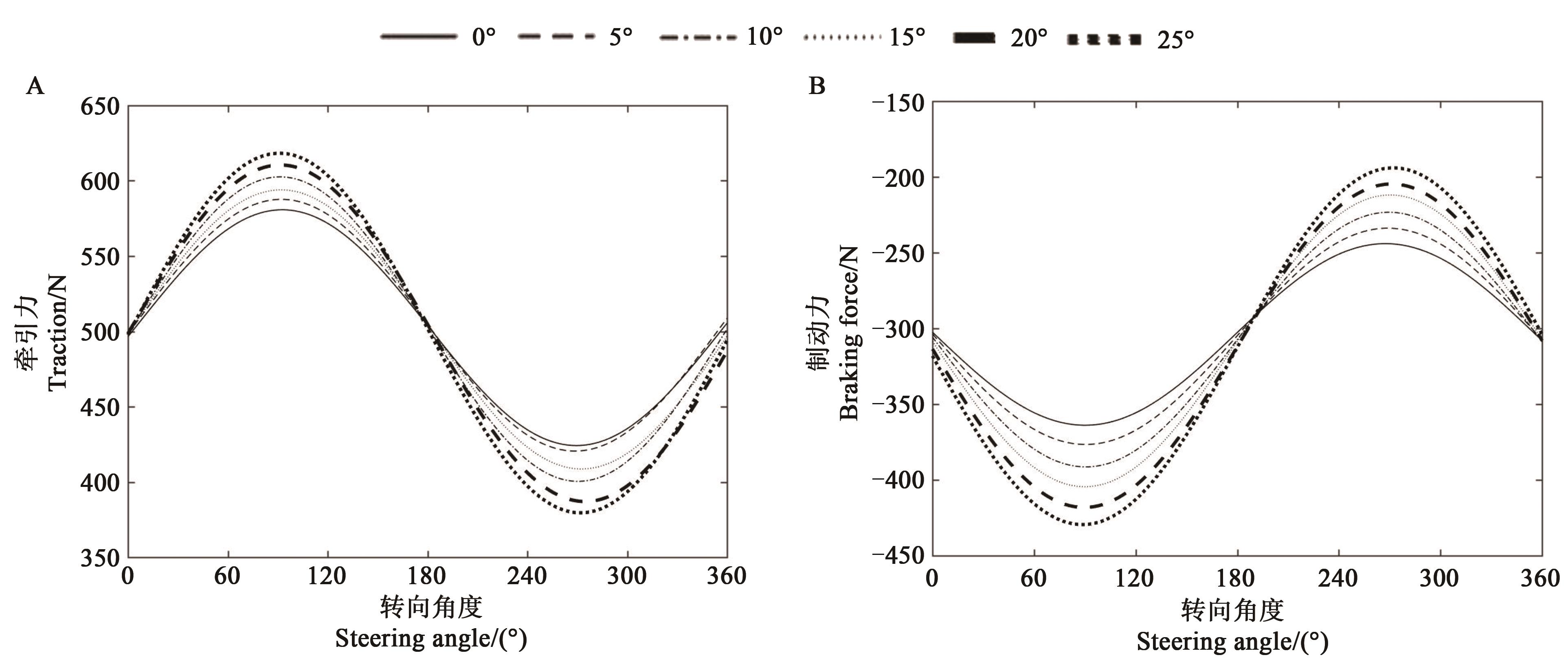
图16 牵引力、制动力随坡角和转向角度的变化A:Fy2 -α-φ;B:Fy1 -α-φ
Fig. 16 Change of the traction and braking force with slope angle and steering angle
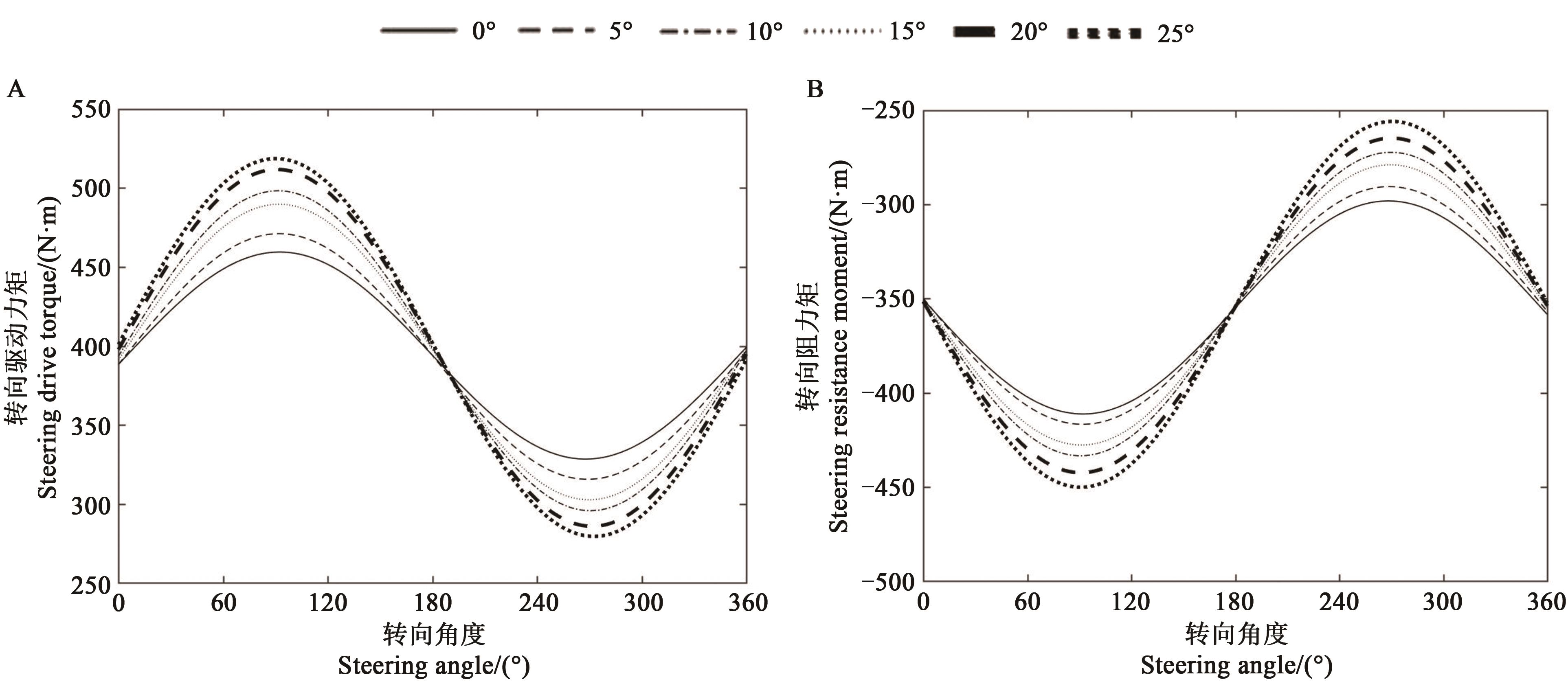
图17 转向驱动力矩、阻力矩随坡角和转向角度的变化A:MT -α-φ;B:MR -α-φ
Fig. 17 Change of steering drive torque and resistance torque with slope angle and steering angle
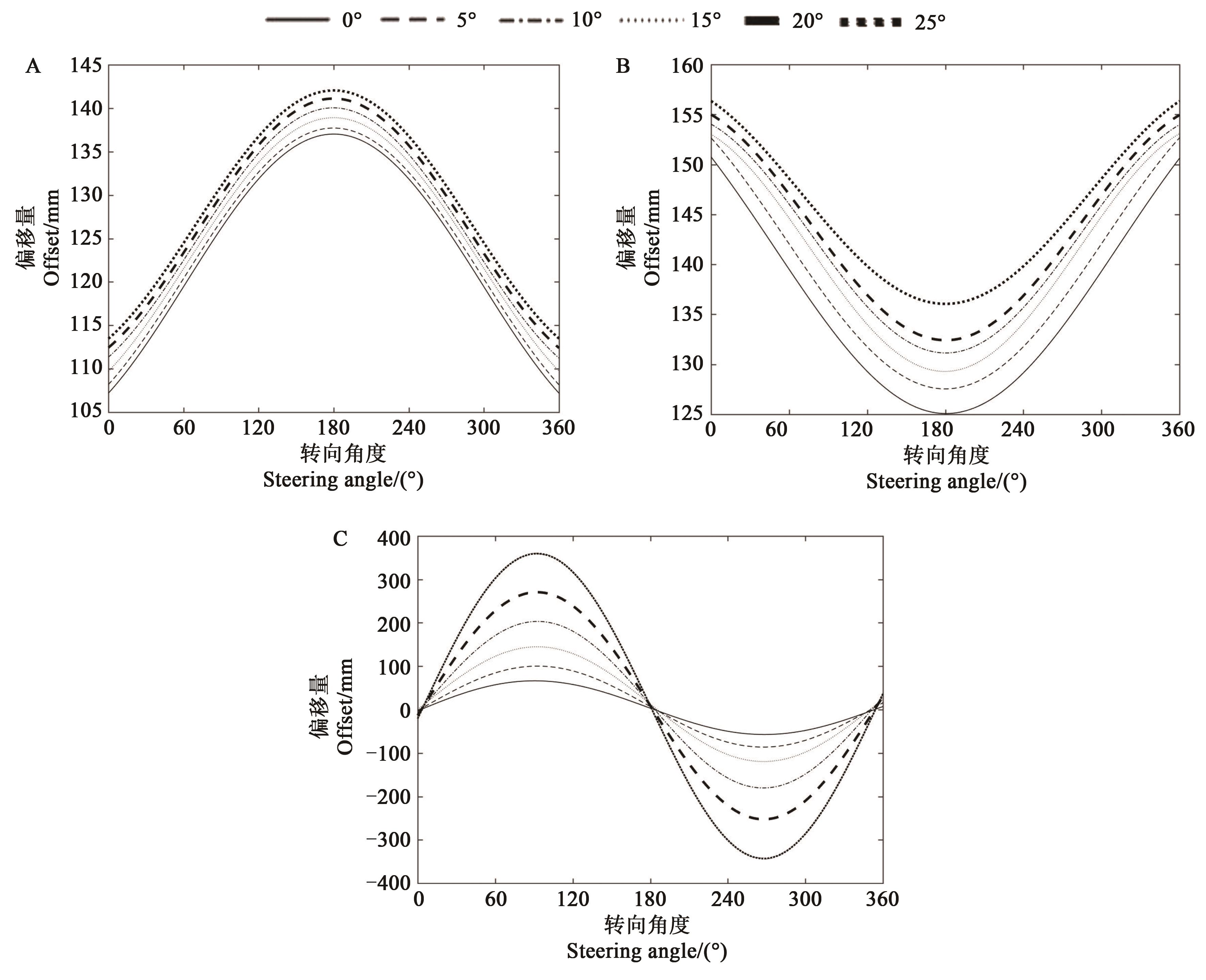
图18 偏移量随坡角和转向角度的变化A:A1-α-φ;B:A2-α-φ;C:D0-α-φ
Fig. 18 Change of the offset with the slope angle and steering anglev
| 1 | 王红岩,陈冰,芮强,等.集中载荷作用下的履带车辆稳态转向分析与试验[J].兵工学报,2016(12): 2196-2204. |
| WANG H Y, CHEN B, RUI Q, et al.. Analysis and experiment of steady-state steering of tracked vehicle under concentrated load [J]. Acta Armamentarii, 2016(12): 2196-2204. | |
| 2 | JANARTHANAN B, PADMANABHAN C, SUJATHA C. Longitudinal dynamics of a tracked vehicle: Simulation and experiment [J]. J. Terramech., 2012, 49(2): 63-72. |
| 3 | 程军伟,高连华,王红岩.基于打滑条件下的履带车辆转向分析[J].机械工程学报, 2006, 42(S): 192-195. |
| CHENG J W, GAO L H, WANG H Y. Steering analysis of tracked vehicles based on skid condition [J]. Chin. J. Mech. Eng., 2006, 42(): 192-195. | |
| 4 | 史青录,孙逢春.履带式车辆斜坡转向稳定性研究[J].农业机械学报, 2007, 38(7):22-26. |
| SHI Q L, SUN F C. Study on steering stability of tracked vehicles on ramp [J]. Trans. Chin. Soc. Agric. Mach., 2007, 38(7):22-26. | |
| 5 | SOLIS J M, LONGORIA R G. Modeling track-terrain interaction for transient robotic vehicle maneuvers [J]. J. Terramechanics, 2008, 45(3):65-78. |
| 6 | WONG J Y. Terramechanics and Off-road Vehicle Engineering: Terrain Behaviour, Off-road Vehicle Performance and Design [M]. 2nd Ed n. Butterworth-heinemann, Amsterdam, 2009:1-488 . |
| 7 | 王红岩,王钦龙,芮强,等.高速履带车辆转向过程分析与试验验证[J].机械工程学报, 2014, 50(16):162-172. |
| WANG H Y, WANG Q L, RUI Q, et al.. Analyzing and testing verification the performance about high-speed tracked vehicles in steering process [J]. Chin. J. Mech. Eng., 2014, 50(16):162-172. | |
| 8 | EDWIN P, SHANKAR K, KANNAN K. Soft soil track interaction modeling in single rigid body tracked vehicle models [J]. J. Terramechanics, 2018, 77:1-14. |
| 9 | 刘妤,谢铌,张拓,等.履带车辆软坡地面力学建模及行驶性能分析[J].机械设计, 2021, 38(3):110-118. |
| LIU Y, XIE N, ZHANG T, et al.. Ground mechanic modeling and analysis on driving performance of tracked vehicles on the soft slope road [J]. J. Machine Design, 2021, 38(3):110-118. | |
| 10 | 芮强,王红岩,王钦龙,等.基于剪应力模型的履带车辆转向力矩分析与试验[J].兵工学报, 2015, 36(6):968-977. |
| RUI Q, WANG H Y, WANG Q L, et al..Analysis and experiment of tracked vehicle steering torque based on shear stress mode [J]. Acta Armamentarii, 2015, 36(6):968-977. | |
| 11 | 朱雷鸣,吴晓平, 建伟,等.直角坐标系的欧拉旋转变换及动力学方程[J].海洋测绘, 2010, 30(3):20-22. |
| ZHU L M, WU X P, LI J W, et al..The Euler’s rotation and dynamic equation of rectangular coordinate system [J]. Hydrographic Survey Charting, 2010, 30(3):20-22. | |
| 12 | 谢铌.小型山地履带底盘坡地行驶性能分析与试验研究[D].重庆:重庆理工大学, 2020. |
| XIE N. Analysis and experimental study on the running performance of the small crawler chassis for mountain on slope [D]. Chongqing: Chongqing University of Technology, 2020. | |
| 13 | 董超,成凯,高学亮,等.离心力影响条件下的履带车滑移转向性能分析[J]. 振动·测试与诊断, 2017(37):76-83. |
| DONG C, CHENG K, GAO X L, et al.. Tracked vehicle skid steer performance analysis under the influence of the centrifugal force [J]. J. Vib. Meas Diagnosis, 2017(37):76-83. | |
| 14 | J.YWONG, CHIANG C.F. A general theory for skid steering of trackedvehicles on firm ground [J]. J. Automobile Eng., 2001,215(3):343-355. |
| 15 | 孙逢春,史青录,翟丽,等.履带式车辆接地比压在斜坡转向时的变化分析[J].农业机械学报, 2006, 37(5):14-18. |
| SUN F C, SHI Q L, ZHAI L, et al.. Study on grounding pressure of tracked vehicles steering on ramp [J]. Trans. Chin. Soc. Agric. Mach., 2006, 37(5):14-18. | |
| 16 | JANOSI Z, HANAMOTO B. Analytical determination of drawbar pull as a function of slip for tracked vehicles in deformable soils [C]// Lyasko P M I. Proceedings of the 1st International Conference on the Mechanics of Soil-Vehicle Systems. Torino, Italy: Edizioni Minerva Tecnica, 1961:707-736. |
| 17 | 胡际勇.重型履带车辆软地面行驶性能研究[D].长春:吉林大学, 2012. |
| HU J Y. Research about the travelling performance of heavy crawler vehicle of soft ground [D]. Changchun: Jilin University, 2012. | |
| 18 | 陈秉聪,范雅操,宁素俭.履带车辆行驶阻力的研究[J].吉林大学学报, 1983(3):19-34. |
| CHEN B C, FAN Y C, NING S J. Study on running resistance of tracked vehicles [J]. J. Jilin Univ. 1983(3):19-34. | |
| 19 | 刘妤,张拓,谢铌,等.小型农用履带底盘多体动力学建模及验证[J].农业工程学报, 2019,35(7):39-46. |
| LIU Y, ZHANG T, XIE N, LIANG J K. Multi-body dynamic modeling and verification of small agricultural crawler chassis [J]. Trans. Chin. Soc. Agric. Eng., 2019, 35(7): 39-46. | |
| 20 | 史金钟,郭振杰,邢鹏飞,等.履带拖拉机转向能力提升分析研究[J].拖拉机与农用运输车, 2017(4):34-37. |
| SHI J Z, GUO Z J, XIN P F, et al.. Analysis of improving steering ability of crawler tractor [J]. Tractor Farm Transporter, 2017(4):34-37. | |
| 21 | 姚禹. 基于履带-地面耦合系统的低速履带车辆通过性研究[D].长春:吉林大学, 2016. |
| YAO Y Research on the trafficability of low-speed tracked vehicle based on track-soil coupling system [D]. Changchun: Jilin University, 2016. | |
| 22 | 孙逢春,史青录.履带式车辆斜坡转向时的动力学特性[J].中国机械工程, 2007, 18(22):2766-2771. |
| SUN F C, SHI Q L. Characteristics of dynamics of tracked vehicles steering on ramp [J]. China Mechan. Eng., 2007, 18(22):2766-2771. | |
| 23 | 胡良平,胡纯严,鲍晓蕾. 应用数理统计[M]. 北京:电子工业出版社, 2015:1-224. |
| HU L P, HU C Y, BAO X L. Applied Mathematical Statistics [M]. Beijing: Publishing House of Electronics Industry, 2015:1-224. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802021197号
京公网安备11010802021197号