| 1 |
梁习卉子,陈兵旗,姜秋慧,等.基于图像处理的玉米收割机导航路线检测方法[J].农业工程学报,2016,32(22):43-49.
|
|
LIANGXI H Z, CHEN B Q, JIANG Q H, et al.. Detection method of navigation route of corn harvester based on image processing [J]. Trans. Chin. Soc. Agric. Eng., 2016,32(22): 43-49.
|
| 2 |
朱弘亮,马兆敏,胡波,等.农业机器人田间导航参照点测距的新方法[J].农机化研究,2016,38(8):68-71, 76.
|
|
ZHU H L, MA Z M, HU B, et al.. A new method for ranging the reference point of field navigation of agricultural robots [J]. Agric. Mechan. Res., 2016, 38(8):68-71, 76.
|
| 3 |
郭飘扬. 履带式联合收割机自主导航系统开发[D]. 南京:南京农业大学,2017.
|
|
GUO P Y. Development of autonomous navigation system for crawler combine harvester [D]. Nanjing:Nanjing Agricultural University, 2017.
|
| 4 |
彭顺正,坎杂,李景彬.矮化密植枣园收获作业视觉导航路径提取[J].农业工程学报,2017,33(9):45-52.
|
|
PENG S Z, KAN Z, LI J B. Extraction of visual navigation path for harvesting operations in dwarfed dense jujube orchards [J]. Trans. Chin. Soc. Agric. Eng., 2017, 33(9):45-52.
|
| 5 |
李景彬,彭顺正,温宝琴,等. 针对矮化密植枣园田管作业视觉导航路径提取方法:CN108509928A[P]. 2018-09-07.
|
| 6 |
胡波. 一种田间近景图像的导航线提取方法:CN109948543A[P].2019-06-28.
|
| 7 |
饶秀勤,林洋洋,张延宁,等. 一种作物封垄后田间导航线的检测方法:CN112146646A[P]. 2020-12-29.
|
| 8 |
廖娟,陈民慧,张锴,等. 一种田间农业机械视觉导航系统及方法:CN113587946A[P]. 2021-11-02.
|
| 9 |
陈娇,姜国权,杜尚丰,等.基于垄线平行特征的视觉导航多垄线识别[J].农业工程学报,2009,25(12):107-113.
|
|
CHEN J, JIANG G Q, DU S F, et al..Visual navigation multi-ridge line recognition based on ridge parallel features [J].Trans. Chin. Soc. Agric. Eng., 2009, 25(12):107-113.
|
| 10 |
刁智华,赵明珍,宋寅卯,等. 基于机器视觉的玉米精准施药系统作物行识别算法及系统实现[J].农业工程学报,2015,31(7):47-52.
|
|
DIAO Z H, ZHAO M Z, SONG Y M, et al.. Crop row recognition algorithm and system implementation of maize precision pesticide application system based on machine vision [J].Trans. Chin. Soc. Agric. Eng., 2015, 31(7): 47-52.
|
| 11 |
宋宇,刘永博,刘路,等.基于机器视觉的玉米根茎导航基准线提取方法[J].农业机械学报,2017,48(2):38-44.
|
|
SONG Y, LIU Y B, LIU L, et al.. Extraction method of maize rhizome navigation base line base donmachine vision [J]. Trans. Chin. Soc. Agric. Machin., 2017,48(2): 38-44.
|
| 12 |
王祥祥,宫金良,张彦斐.基于机器视觉的玉米行导航线提取方法[J].山东理工大学学报(自然科学版),2021,35(2):19-22, 27.
|
|
WANG X X, GONG J L, ZHANG Y F. Maize row navigation line extraction method based on machine vision [J]. J. Shandong Univ.Technol. (Nat. Sci.),2021,35(2):19-22, 27.
|
| 13 |
关卓怀,陈科尹,丁幼春,等.水稻收获作业视觉导航路径提取方法[J].农业机械学报,2020,51(1):19-28.
|
|
GUAN Z H, CHEN K Y, DING Y C, et al.. Extraction method of visual navigation path for rice harvest operation [J].Trans. Chin. Soc. Agric. Machin., 2020, 51(1):19-28.
|
| 14 |
GARCÍA-SANTILLÁN I, GUERRERO J M, MONTALVO M, et al.. Curved and straight crop row detection by accumulation of green pixels from images in maize fields [J]. Precision Agric., 2018,19(1):18-41.
|
| 15 |
NADEEM F, KHUSHBAKHT R. Integration of remote sensing and GIS to extract plantation rows from a drone-based image point cloud digital surface model [J/OL]. ISPRS Int. J. Geo-Inf., 2020, 9(3):151 [2022-02-23]. .
|
| 16 |
BASSO M, FREITAS E P D. A UAV guidance system using crop row detection and line follower algorithms [J]. J. Intellig. Robotic Syst.,2020,97(3):605-621.
|
| 17 |
国家统计局. 2021中国统计年鉴(EB/OL).(2021-09-01) [2022-02-23]. .
|
| 18 |
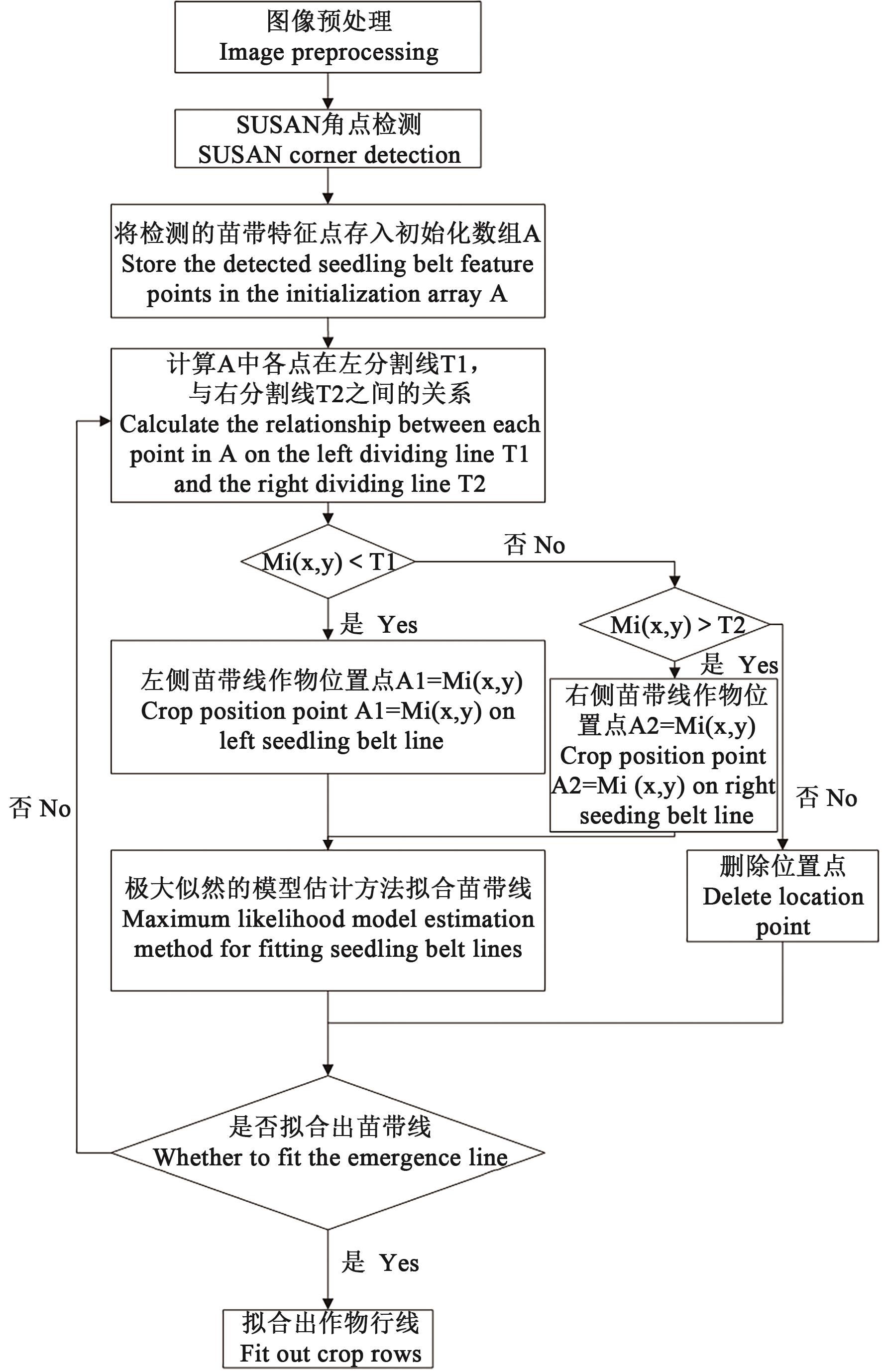
SMITH S M, BRADY J M. SUSAN - a new approach to low level image processing [J]. Int. J. Computer Vision,1997,23(1):45-78.
|
| 19 |
WOEBBECHE D M, MEYER G E, BARGEN K V, et al.. Color indices for weed identification under various soil, residue, and lighting conditions [J]. Trans. ASABE,1995,38(1): 259-269.
|
| 20 |
孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学报,2014,34(7):180-186.
|
|
MENG Q K, HE J, QIU R C, et al.. Crop row recognition and navigation line extraction in natural environment based on machine vision [J]. Acta Optica Sin., 2014,34(7):180-186.
|
| 21 |
TORR P H S, ZISSERMAN A. MLESAC: a new robust estimator with application to estimating image geometry [J]. Computer Vision Image Understand.,2000,78(1): 138-156.
|










 ), Gang CHE1,2(
), Gang CHE1,2( 京公网安备11010802021197号
京公网安备11010802021197号