









Journal of Agricultural Science and Technology ›› 2025, Vol. 27 ›› Issue (9): 120-130.DOI: 10.13304/j.nykjdb.2024.0188
• INTELLIGENT AGRICULTURE & AGRICULTURAL MACHINERY • Previous Articles
Haidong ZHANG1( ), Zhixian TANG1, Liyun ZHANG1, Qi YU1, Chaojun SONG2()
), Zhixian TANG1, Liyun ZHANG1, Qi YU1, Chaojun SONG2()
Received:2024-03-13
Accepted:2024-05-05
Online:2025-09-15
Published:2025-09-24
Contact:
Chaojun SONG
张海东1(), 唐志贤1, 张立芸1, 于淇1, 宋朝君2()
通讯作者:
宋朝君
作者简介:张海东 E-mail:zhd_74@126.com;
基金资助:CLC Number:
Haidong ZHANG, Zhixian TANG, Liyun ZHANG, Qi YU, Chaojun SONG. Optimization of Discrete Elemental Simulation Parameters for Forest Panax pseudoginseng Plantation Red Soil Based on GA-BP-GA[J]. Journal of Agricultural Science and Technology, 2025, 27(9): 120-130.
张海东, 唐志贤, 张立芸, 于淇, 宋朝君. 基于GA-BP-GA优化林下三七种植红壤离散元仿真参数[J]. 中国农业科技导报, 2025, 27(9): 120-130.
| 级别Grade | D:粒径Particle diameter/mm | 占比Percentage/% |
|---|---|---|
| 1 | D>2.5 | 31.34 |
| 2 | 2.5≤D>2.0 | 8.78 |
| 3 | 2.0≤D>1.6 | 8.16 |
| 4 | 1.6≤D>1.0 | 21.47 |
| 5 | 1.0≤D>0.6 | 21.29 |
| 6 | D<0.6 | 8.96 |
Table 1 Soil particle size classification criteria and percentage
| 级别Grade | D:粒径Particle diameter/mm | 占比Percentage/% |
|---|---|---|
| 1 | D>2.5 | 31.34 |
| 2 | 2.5≤D>2.0 | 8.78 |
| 3 | 2.0≤D>1.6 | 8.16 |
| 4 | 1.6≤D>1.0 | 21.47 |
| 5 | 1.0≤D>0.6 | 21.29 |
| 6 | D<0.6 | 8.96 |
Fig. 1 Angle of repose simulation device

Fig. 2 Flow of GA-BP-GA model
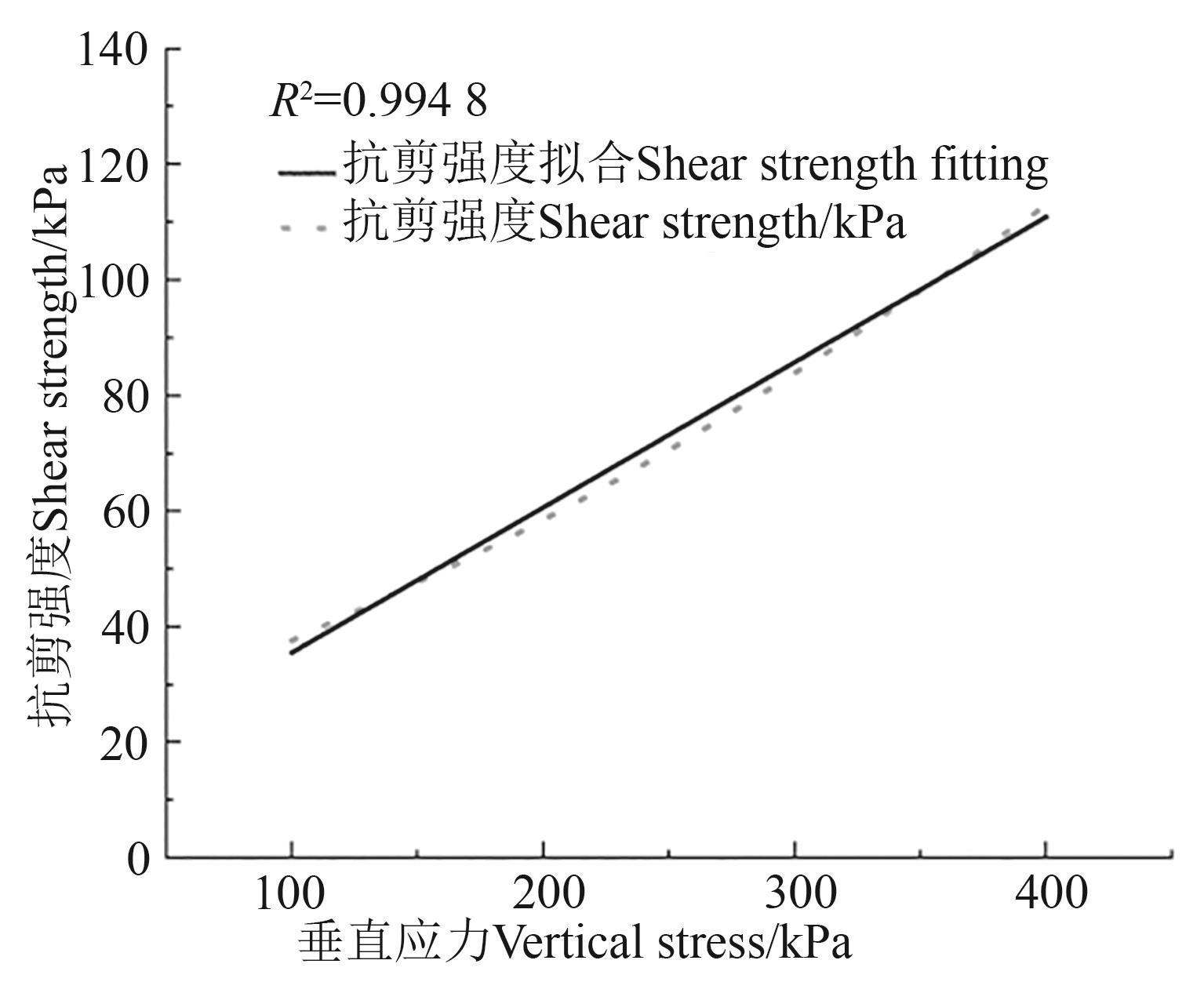
Fig. 3 Relationship of shear strength versus vertical stress
序号 Serial number | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | X11 | 堆积角 Stacking angle/(°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0.15 | 1.16 | 0.05 | 0.60 | 0.60 | 0.04 | 1 | 1 | 1 | -1 | 10.07 |
| 2 | 12 | 0.15 | 1.16 | 0.25 | 0.04 | 0.60 | 0.20 | 1 | -1 | -1 | -1 | 67.28 |
| 3 | 12 | 0.75 | 1.16 | 0.05 | 0.04 | 0.40 | 0.20 | -1 | 1 | 1 | -1 | 27.25 |
| 4 | 12 | 0.75 | 0.44 | 0.25 | 0.60 | 0.60 | 0.04 | -1 | -1 | 1 | -1 | 58.59 |
| 5 | 0 | 0.75 | 1.16 | 0.05 | 0.60 | 0.60 | 0.20 | -1 | -1 | -1 | 1 | 3.43 |
| 6 | 12 | 0.15 | 0.44 | 0.05 | 0.60 | 0.40 | 0.20 | 1 | -1 | 1 | 1 | 67.02 |
| 7 | 12 | 0.15 | 1.16 | 0.25 | 0.60 | 0.40 | 0.04 | -1 | 1 | -1 | 1 | 69.51 |
| 8 | 12 | 0.75 | 0.44 | 0.05 | 0.04 | 0.60 | 0.04 | 1 | 1 | -1 | 1 | 31.21 |
| 9 | 0 | 0.15 | 0.44 | 0.05 | 0.04 | 0.40 | 0.04 | -1 | -1 | -1 | -1 | 4.95 |
| 10 | 0 | 0.75 | 1.16 | 0.25 | 0.04 | 0.40 | 0.04 | 1 | -1 | 1 | 1 | 3.58 |
| 11 | 0 | 0.75 | 0.44 | 0.25 | 0.60 | 0.40 | 0.20 | 1 | 1 | -1 | -1 | 12.02 |
| 12 | 0 | 0.15 | 0.44 | 0.25 | 0.04 | 0.60 | 0.20 | -1 | 1 | 1 | 1 | 30.03 |
Table 2 Plackett-Burman program and result
序号 Serial number | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | X11 | 堆积角 Stacking angle/(°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0.15 | 1.16 | 0.05 | 0.60 | 0.60 | 0.04 | 1 | 1 | 1 | -1 | 10.07 |
| 2 | 12 | 0.15 | 1.16 | 0.25 | 0.04 | 0.60 | 0.20 | 1 | -1 | -1 | -1 | 67.28 |
| 3 | 12 | 0.75 | 1.16 | 0.05 | 0.04 | 0.40 | 0.20 | -1 | 1 | 1 | -1 | 27.25 |
| 4 | 12 | 0.75 | 0.44 | 0.25 | 0.60 | 0.60 | 0.04 | -1 | -1 | 1 | -1 | 58.59 |
| 5 | 0 | 0.75 | 1.16 | 0.05 | 0.60 | 0.60 | 0.20 | -1 | -1 | -1 | 1 | 3.43 |
| 6 | 12 | 0.15 | 0.44 | 0.05 | 0.60 | 0.40 | 0.20 | 1 | -1 | 1 | 1 | 67.02 |
| 7 | 12 | 0.15 | 1.16 | 0.25 | 0.60 | 0.40 | 0.04 | -1 | 1 | -1 | 1 | 69.51 |
| 8 | 12 | 0.75 | 0.44 | 0.05 | 0.04 | 0.60 | 0.04 | 1 | 1 | -1 | 1 | 31.21 |
| 9 | 0 | 0.15 | 0.44 | 0.05 | 0.04 | 0.40 | 0.04 | -1 | -1 | -1 | -1 | 4.95 |
| 10 | 0 | 0.75 | 1.16 | 0.25 | 0.04 | 0.40 | 0.04 | 1 | -1 | 1 | 1 | 3.58 |
| 11 | 0 | 0.75 | 0.44 | 0.25 | 0.60 | 0.40 | 0.20 | 1 | 1 | -1 | -1 | 12.02 |
| 12 | 0 | 0.15 | 0.44 | 0.25 | 0.04 | 0.60 | 0.20 | -1 | 1 | 1 | 1 | 30.03 |
因素 Factor | 平方和 Sum of squares | 自由度 Degree of freedom | 均方 Mean square | F值 F value | P值 P value |
|---|---|---|---|---|---|
| X1 | 5 495.09 | 7 | 1 105.77 | 203.96 | 0.000 1** |
| X2 | 1 059.76 | 1 | 5 495.09 | 39.33 | 0.003 3** |
| X3 | 42.98 | 1 | 1 059.76 | 1.60 | 0.275 2 |
| X4 | 785.38 | 1 | 42.98 | 29.15 | 0.005 7** |
| X5 | 264.52 | 1 | 785.38 | 9.82 | 0.035 1* |
| X6 | 22.09 | 1 | 264.52 | 0.82 | 0.416 4 |
| X7 | 70.62 | 1 | 22.09 | 2.62 | 0.180 8 |
Table 3 Plackett-Burman test significance analysis
因素 Factor | 平方和 Sum of squares | 自由度 Degree of freedom | 均方 Mean square | F值 F value | P值 P value |
|---|---|---|---|---|---|
| X1 | 5 495.09 | 7 | 1 105.77 | 203.96 | 0.000 1** |
| X2 | 1 059.76 | 1 | 5 495.09 | 39.33 | 0.003 3** |
| X3 | 42.98 | 1 | 1 059.76 | 1.60 | 0.275 2 |
| X4 | 785.38 | 1 | 42.98 | 29.15 | 0.005 7** |
| X5 | 264.52 | 1 | 785.38 | 9.82 | 0.035 1* |
| X6 | 22.09 | 1 | 264.52 | 0.82 | 0.416 4 |
| X7 | 70.62 | 1 | 22.09 | 2.62 | 0.180 8 |
序号 Serial number | X1 | X2 | X4 | X5 | 堆积角 Stacking angle/(°) | 相对误差 Relative error/% |
|---|---|---|---|---|---|---|
| 1 | 0.00 | 0.75 | 0.05 | 0.04 | 1.53 | 95.91 |
| 2 | 3.00 | 0.60 | 0.10 | 0.18 | 13.44 | 64.06 |
| 3 | 6.00 | 0.45 | 0.15 | 0.32 | 37.71 | 0.82 |
| 4 | 9.00 | 0.30 | 0.20 | 0.46 | 53.63 | 43.40 |
| 5 | 12.00 | 0.15 | 0.25 | 0.60 | 65.68 | 75.60 |
Table 4 Steepest slope test and result
序号 Serial number | X1 | X2 | X4 | X5 | 堆积角 Stacking angle/(°) | 相对误差 Relative error/% |
|---|---|---|---|---|---|---|
| 1 | 0.00 | 0.75 | 0.05 | 0.04 | 1.53 | 95.91 |
| 2 | 3.00 | 0.60 | 0.10 | 0.18 | 13.44 | 64.06 |
| 3 | 6.00 | 0.45 | 0.15 | 0.32 | 37.71 | 0.82 |
| 4 | 9.00 | 0.30 | 0.20 | 0.46 | 53.63 | 43.40 |
| 5 | 12.00 | 0.15 | 0.25 | 0.60 | 65.68 | 75.60 |
| 序号Serial number | 堆积角Stacking angle/(°) | ||||
|---|---|---|---|---|---|
| 1 | 6.00 | 0.45 | 0.15 | 0.32 | 34.30 |
| 2 | 6.00 | 0.60 | 0.20 | 0.32 | 31.68 |
| 3 | 3.00 | 0.45 | 0.20 | 0.32 | 26.11 |
| 4 | 6.00 | 0.30 | 0.10 | 0.32 | 35.36 |
| 5 | 9.00 | 0.45 | 0.15 | 0.46 | 47.32 |
| 6 | 3.00 | 0.45 | 0.15 | 0.46 | 26.09 |
| 7 | 9.00 | 0.45 | 0.15 | 0.18 | 50.23 |
| 8 | 3.00 | 0.30 | 0.15 | 0.32 | 26.72 |
| 9 | 6.00 | 0.45 | 0.15 | 0.32 | 34.02 |
| 10 | 9.00 | 0.45 | 0.10 | 0.32 | 45.02 |
| 11 | 3.00 | 0.60 | 0.15 | 0.46 | 26.70 |
| 12 | 3.00 | 0.45 | 0.10 | 0.46 | 30.15 |
| 13 | 3.00 | 0.30 | 0.15 | 0.18 | 42.72 |
| 14 | 3.00 | 0.45 | 0.15 | 0.32 | 43.02 |
| 15 | 3.00 | 0.60 | 0.10 | 0.32 | 20.01 |
| 16 | 9.00 | 0.30 | 0.15 | 0.32 | 53.97 |
| 17 | 6.00 | 0.45 | 0.20 | 0.18 | 46.41 |
| 18 | 6.00 | 0.30 | 0.20 | 0.32 | 47.36 |
| 19 | 6.00 | 0.45 | 0.20 | 0.46 | 36.37 |
| 20 | 3.00 | 0.45 | 0.15 | 0.18 | 21.70 |
| 21 | 6.00 | 0.60 | 0.15 | 0.18 | 26.43 |
| 22 | 9.00 | 0.45 | 0.20 | 0.32 | 49.15 |
| 23 | 3.00 | 0.45 | 0.10 | 0.32 | 13.01 |
| 24 | 6.00 | 0.45 | 0.10 | 0.18 | 26.22 |
| 25 | 6.00 | 0.30 | 0.15 | 0.46 | 39.25 |
| 26 | 3.00 | 0.60 | 0.15 | 0.32 | 15.41 |
| 27 | 6.00 | 0.45 | 0.15 | 0.32 | 37.34 |
| 28 | 6.00 | 0.45 | 0.15 | 0.32 | 36.11 |
| 29 | 9.00 | 0.60 | 0.15 | 0.32 | 42.51 |
Table 5 Orthogonal quadratic rotatable combination experiment and result
| 序号Serial number | 堆积角Stacking angle/(°) | ||||
|---|---|---|---|---|---|
| 1 | 6.00 | 0.45 | 0.15 | 0.32 | 34.30 |
| 2 | 6.00 | 0.60 | 0.20 | 0.32 | 31.68 |
| 3 | 3.00 | 0.45 | 0.20 | 0.32 | 26.11 |
| 4 | 6.00 | 0.30 | 0.10 | 0.32 | 35.36 |
| 5 | 9.00 | 0.45 | 0.15 | 0.46 | 47.32 |
| 6 | 3.00 | 0.45 | 0.15 | 0.46 | 26.09 |
| 7 | 9.00 | 0.45 | 0.15 | 0.18 | 50.23 |
| 8 | 3.00 | 0.30 | 0.15 | 0.32 | 26.72 |
| 9 | 6.00 | 0.45 | 0.15 | 0.32 | 34.02 |
| 10 | 9.00 | 0.45 | 0.10 | 0.32 | 45.02 |
| 11 | 3.00 | 0.60 | 0.15 | 0.46 | 26.70 |
| 12 | 3.00 | 0.45 | 0.10 | 0.46 | 30.15 |
| 13 | 3.00 | 0.30 | 0.15 | 0.18 | 42.72 |
| 14 | 3.00 | 0.45 | 0.15 | 0.32 | 43.02 |
| 15 | 3.00 | 0.60 | 0.10 | 0.32 | 20.01 |
| 16 | 9.00 | 0.30 | 0.15 | 0.32 | 53.97 |
| 17 | 6.00 | 0.45 | 0.20 | 0.18 | 46.41 |
| 18 | 6.00 | 0.30 | 0.20 | 0.32 | 47.36 |
| 19 | 6.00 | 0.45 | 0.20 | 0.46 | 36.37 |
| 20 | 3.00 | 0.45 | 0.15 | 0.18 | 21.70 |
| 21 | 6.00 | 0.60 | 0.15 | 0.18 | 26.43 |
| 22 | 9.00 | 0.45 | 0.20 | 0.32 | 49.15 |
| 23 | 3.00 | 0.45 | 0.10 | 0.32 | 13.01 |
| 24 | 6.00 | 0.45 | 0.10 | 0.18 | 26.22 |
| 25 | 6.00 | 0.30 | 0.15 | 0.46 | 39.25 |
| 26 | 3.00 | 0.60 | 0.15 | 0.32 | 15.41 |
| 27 | 6.00 | 0.45 | 0.15 | 0.32 | 37.34 |
| 28 | 6.00 | 0.45 | 0.15 | 0.32 | 36.11 |
| 29 | 9.00 | 0.60 | 0.15 | 0.32 | 42.51 |
方差来源 Source of variation | 平方和 Sum of square | 自由度 Degree of freedom | 均方 Mean square | F值 F value | P值 P value |
|---|---|---|---|---|---|
| 模型Model | 3 191.26 | 14 | 227.950 0 | 33.880 0 | <0.000 1** |
| X1 | 2 111.52 | 1 | 2 111.520 0 | 313.800 0 | <0.000 1** |
| X2 | 569.11 | 1 | 569.110 0 | 84.580 0 | <0.000 1** |
| X4 | 377.55 | 1 | 377.550 0 | 56.110 0 | <0.000 1** |
| X5 | 5.12 | 1 | 5.120 0 | 0.761 2 | 0.397 7 |
| X1X2 | 0.01 | 1 | 0.006 0 | 0.000 9 | 0.976 6 |
| X1X4 | 20.14 | 1 | 20.140 0 | 2.990 0 | 0.105 6 |
| X1X5 | 13.32 | 1 | 13.320 0 | 1.980 0 | 0.181 2 |
| X2X4 | 0.03 | 1 | 0.028 9 | 0.004 3 | 0.948 7 |
| X2X5 | 3.51 | 1 | 3.510 0 | 0.521 1 | 0.482 3 |
| X4X5 | 48.76 | 1 | 48.760 0 | 7.250 0 | 0.017 5* |
| X12 | 3.53 | 1 | 3.530 0 | 0.524 3 | 0.480 9 |
| X22 | 22.83 | 1 | 22.830 0 | 3.390 0 | 0.086 7 |
| X42 | 26.86 | 1 | 26.860 0 | 3.990 0 | 0.065 5 |
| X52 | 1.26 | 1 | 1.260 0 | 0.187 7 | 0.671 4 |
| 残差Residua | 94.20 | 14 | 6.730 0 | ||
| 失拟项Lack of fit | 40.93 | 10 | 4.090 0 | 0.307 3 | 0.940 7 |
| 纯误差Pure error | 53.27 | 4 | 13.320 0 | ||
| 总和Sum | 3 285.46 | 28 |
Table 6 Analysis of variance for regression models
方差来源 Source of variation | 平方和 Sum of square | 自由度 Degree of freedom | 均方 Mean square | F值 F value | P值 P value |
|---|---|---|---|---|---|
| 模型Model | 3 191.26 | 14 | 227.950 0 | 33.880 0 | <0.000 1** |
| X1 | 2 111.52 | 1 | 2 111.520 0 | 313.800 0 | <0.000 1** |
| X2 | 569.11 | 1 | 569.110 0 | 84.580 0 | <0.000 1** |
| X4 | 377.55 | 1 | 377.550 0 | 56.110 0 | <0.000 1** |
| X5 | 5.12 | 1 | 5.120 0 | 0.761 2 | 0.397 7 |
| X1X2 | 0.01 | 1 | 0.006 0 | 0.000 9 | 0.976 6 |
| X1X4 | 20.14 | 1 | 20.140 0 | 2.990 0 | 0.105 6 |
| X1X5 | 13.32 | 1 | 13.320 0 | 1.980 0 | 0.181 2 |
| X2X4 | 0.03 | 1 | 0.028 9 | 0.004 3 | 0.948 7 |
| X2X5 | 3.51 | 1 | 3.510 0 | 0.521 1 | 0.482 3 |
| X4X5 | 48.76 | 1 | 48.760 0 | 7.250 0 | 0.017 5* |
| X12 | 3.53 | 1 | 3.530 0 | 0.524 3 | 0.480 9 |
| X22 | 22.83 | 1 | 22.830 0 | 3.390 0 | 0.086 7 |
| X42 | 26.86 | 1 | 26.860 0 | 3.990 0 | 0.065 5 |
| X52 | 1.26 | 1 | 1.260 0 | 0.187 7 | 0.671 4 |
| 残差Residua | 94.20 | 14 | 6.730 0 | ||
| 失拟项Lack of fit | 40.93 | 10 | 4.090 0 | 0.307 3 | 0.940 7 |
| 纯误差Pure error | 53.27 | 4 | 13.320 0 | ||
| 总和Sum | 3 285.46 | 28 |
节点数目 Number of nodes | 均方误差 Mean square error |
|---|---|
| 3 | 0.241 99 |
| 4 | 0.114 55 |
| 5 | 4.357 10 |
| 6 | 0.104 38 |
| 7 | 0.144 82 |
| 8 | 0.228 22 |
| 9 | 1.453 40 |
| 10 | 0.201 95 |
| 11 | 0.010 72 |
| 12 | 0.317 42 |
| 13 | 1.939 60 |
Table 7 Mean square error of the training set
节点数目 Number of nodes | 均方误差 Mean square error |
|---|---|
| 3 | 0.241 99 |
| 4 | 0.114 55 |
| 5 | 4.357 10 |
| 6 | 0.104 38 |
| 7 | 0.144 82 |
| 8 | 0.228 22 |
| 9 | 1.453 40 |
| 10 | 0.201 95 |
| 11 | 0.010 72 |
| 12 | 0.317 42 |
| 13 | 1.939 60 |
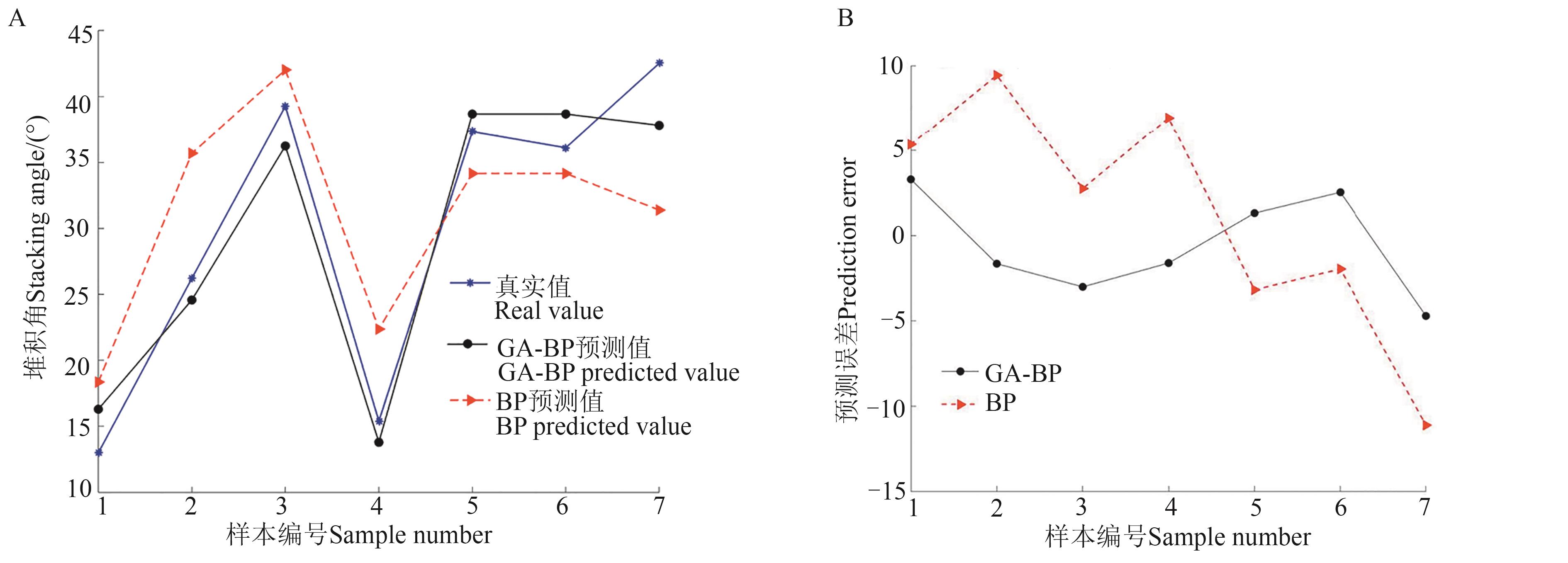
Fig. 4 Comparison of prediction results between BP and GA?BP networksA:Stacking angle; B:Prediction error
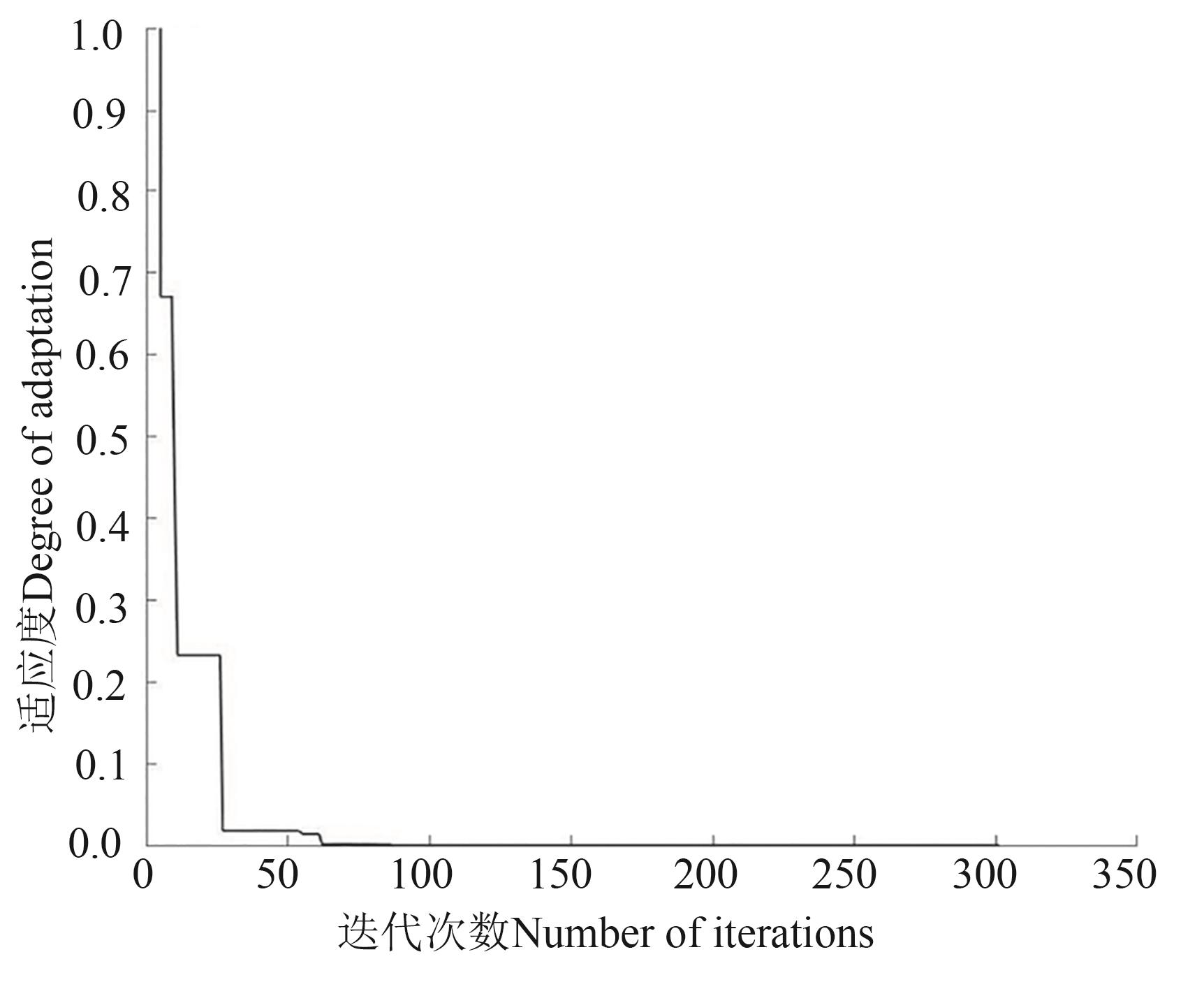
Fig. 5 Fitness curve
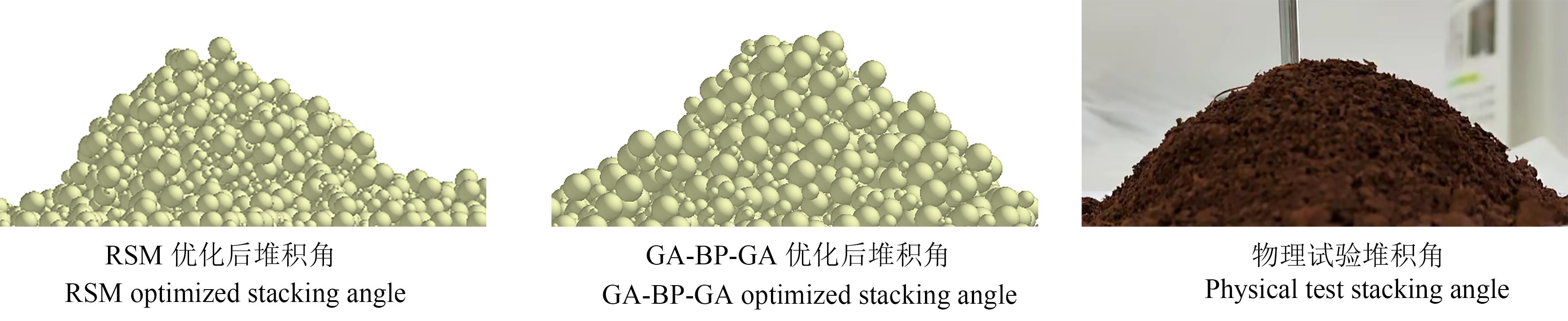
Fig. 6 Compare between stacking angle of RSM, GA-BP-GA and Physical test
| [1] | 张川.基于土壤重构的云南红壤复合土力学特性及影响机制研究[D].徐州:中国矿业大学,2023. |
| ZHANG C. Study on the mechanical properties and mechanisms during soil reconstruction of red soil complex in Yunnan [D]. Xuzhou: China University of Mining and Technology, 2023. | |
| [2] | 邢洁洁,张锐,吴鹏,等.海南热区砖红壤颗粒离散元仿真模型参数标定[J].农业工程学报,2020,36(5):158-166. |
| XING J J, ZHANG R, WU P, et al.. Parameter calibration of discrete element simulation model for latosol particles in hot areas of Hainan province [J]. Trans. Chin. Soc. Agric. Eng., 2020, 36(5): 158-166. | |
| [3] | 曾智伟,马旭,曹秀龙,等.离散元法在农业工程研究中的应用现状和展望[J].农业机械学报, 2021, 52(4):1-20. |
| ZENG Z W, MA X, CAO X L, et al.. Critical review of applications of discrete element method in agricultural engineering [J]. Trans. Chin. Soc. Agric. Mach., 2021, 52(4): 1-20. | |
| [4] | 韩燕龙, 贾富国, 唐玉荣, 等.颗粒滚动摩擦系数对堆积特性的影响[J].物理学报,2014,63(17):173-179. |
| HAN Y L, JIA F G, TANG Y R, et al.. Influence of granular co efficient of rolling friction on accumulation characteristics [J]. Acta Phys. Sin., 2014, 63(17): 173-179. | |
| [5] | 孙景彬,刘琪,杨福增,等.黄土高原坡地土壤与旋耕部件互作离散元仿真参数标定[J].农业机械学报,2022,53(1):63-73. |
| SUN J B, LIU Q, YANG F Z, et al.. Calibration of discrete element simulation parameters of sloping soil on Loess Plateau and its interaction with rotary tillage components [J]. Trans. Chin. Soc. Agric. Mach., 2022, 53(1): 63-73. | |
| [6] | QIU Y Q, GUO Z J, JIN X, et al.. Calibration and verification test of cinnamon soil simulation parameters based on discrete element method [J]. Agriculture, 2022, 12(8):1082-1092. |
| [7] | ZHU J, ZOU M, LIU Y, et al.. Measurement and calibration of DEM parameters of lunar soil simulant [J]. Acta Astronaut., 2022, 191: 169-177. |
| [8] | 林恒矗,王琪,廖鹏,等.植烟沙壤土与触土部件相互作用的离散元仿真参数标定[J].中国农机化学报,2022,43(5):196-203. |
| LIN H C, WANG Q, LIAO P, et al.. Discrete element simulation parameter calibration for the interaction between vegetated sandy loam soil and soil-touching components [J]. J. Chin. Agric. Mech., 2022, 43(5): 196-203. | |
| [9] | 宋占华,李浩,闫银发,等.桑园土壤非等径颗粒离散元仿真模型参数标定与试验[J].农业机械学报,2022,53(6):21-33. |
| SONG Z H, LI H, YAN Y F, et al.. Calibration method of contact characteristic parameters of soil in mulberry field based on unequal-diameter particles DEM theory [J]. Trans. Chin. Soc. Agric. Mach., 2022, 53(6): 21-33. | |
| [10] | 向伟,吴明亮,吕江南,等.基于堆积试验的黏壤土仿真物理参数标定[J].农业工程学报,2019,35(12):116-123. |
| XIANG W, WU M L, LYU J N, et al.. Calibration of simulation physical parameters of clay loam based on soil accumulation test [J]. Trans. Chin. Soc. Agric. Eng., 2019, 35(12): 116-123. | |
| [11] | 麻芳兰,黄文波,李尚平,等.广西甘蔗赤红壤离散元模型参数标定[J].农机化研究, 2023, 45(11): 18-26. |
| MA F L, HUANG W B, LI S P, et al.. Parameters calibration of discrete element model for latosolic red soil of sugarcane in Guangxi autonomous region [J]. J. Agric. Mech. Res., 2023, 45(11): 18-26. | |
| [12] | 马建春,马灶亮,张昊亮,等.补阳还五汤提取工艺的响应面法和人工神经网络模型优化[J].时珍国医国药,2019,30(2):337-340. |
| MA J C, MA Z L, ZHANG H L, et al.. Extraction process optimization for Buyanghuanwu decoction by response surface methodology and back propagation artificial neural network [J]. Lishizhen Med. Mater. Med. Res., 2019, 30(2): 337-340. | |
| [13] | 丁辛亭,李凯,郝伟,等.基于RSM和GA-BP-GA优化的油茶籽仿真参数标定[J].农业机械学报,2023,54(2):139-150. |
| DING X T, LI K, HAO W, et al.. Calibration of simulation parameters of Camellia oleifera seeds based on RSM and GA-BP-GA optimization [J]. Trans. Chin. Soc. Agric. Mach., 2023, 54(2): 139-150. | |
| [14] | 马文鹏,尤泳,王德成,等.基于RSM和NSGA-Ⅱ的苜蓿种子离散元模型参数标定[J].农业机械学报,2020,51(8):136-144. |
| MA W P, YOU Y, WANG D C, et al.. Parameter calibration of alfalfa seed discrete element model based on RSM and NSGA-Ⅱ [J]. Trans. Chin. Soc. Agric. Mach., 2020, 51(8): 136-144. | |
| [15] | 王洪波,马哲,乌兰图雅,等.采用BP神经网络和Burgers模型的细观参数标定[J].农业工程学报,2022,38(23):152-161. |
| WANG H B, MA Z, Wulantuya, et al.. Calibration method of mesoscopic parameters using BP neural network and Burgers model [J]. Trans. Chin. Soc. Agric. Eng., 2022, 38(23): 152-161. | |
| [16] | 钟惟亮,丁昊,范立峰.基于BP神经网络的地聚物混凝土细观参数标定研究[J/OL].工程力学,2023:1-10 [2024-01-13].. |
| ZHONG W L, DING H, FAN L F. Research on mesoscopic parameters calibration of geopolymer concrete upon BP neural network [J/OL]. Eng. Mech., 2023:1-10 [2024-01-13]. . | |
| [17] | 张海辉,张珍,张斯威,等.黄瓜初花期光合速率主要影响因素分析与模型构建[J].农业机械学报,2017,48(6):242-248. |
| ZHANG H H, ZHANG Z, ZHANG S W, et al.. Analysis of main influencing factors and modeling of photosynthetic rate for cucumber at initial flowering stage [J]. Trans. Chin. Soc. Agric. Mach., 2017, 48(6): 242-248. | |
| [18] | 中华人民共和国住房和城乡建设部. 土工试验方法标准: [S].北京:中国计划出版社,2019. |
| [19] | 刘坤宇,苏宏杰,李飞宇,等.基于响应曲面法的土壤离散元模型的参数标定研究[J].中国农机化学报,2021,42(9):143-149. |
| LIU K Y, SU H J, LI F Y, et al.. Research on parameter calibration of soil discrete element model based on response surface method [J]. J. Chin. Agric. Mech., 2021, 42(9): 143-149. | |
| [20] | 石林榕,赵武云,孙伟.基于离散元的西北旱区农田土壤颗粒接触模型和参数标定[J].农业工程学报,2017,33(21):181-187. |
| SHI L R, ZHAO W Y, SUN W. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method [J]. Trans. Chin. Soc. Agric. Eng., 2017, 33(21): 181-187. | |
| [21] | HÆRVIG J, KLEINHANS U, WIELAND C, et al.. On the adhesive JKR contact and rolling models for reduced particle stiffness discrete element simulations [J]. Powder Technol., 2017, 319: 472-482. |
| [22] | 罗帅,袁巧霞, GOUDA Shaban,等.基于JKR粘结模型的蚯蚓粪基质离散元法参数标定[J].农业机械学报,2018,49(4):343-350. |
| LUO S, YUAN Q X, GOUDA S B, et al.. Parameters calibration of vermicomposting nursery substrate with discrete element method based on JKR contact model [J]. Trans. Chin. Soc. Agric. Mach., 2018, 49(4): 343-350. | |
| [23] | 李清超,郑炫,刘进宝,等.新疆农田粉土离散元仿真参数标定[J].新疆农业科学,2022,59(8):2014-2024. |
| LI Q C, ZHENG X, LIU J B, et al.. Parameter calibration of discrete element simulation of farmland silt in Xinjiang [J]. Xinjiang Agric. Sci., 2022, 59(8): 2014-2024. | |
| [24] | 薛茂远,梅益,唐方艳,等.基于GA-ELM及遗传算法的注塑件成型工艺优化[J].塑料,2022,51(1):56-61, 66. |
| XUE M Y, MEI Y, TANG F Y, et al.. Optimization of injection molding process based on GA-ELM and genetic algorithm [J]. Plastics, 2022, 51(1): 56-61, 66. | |
| [25] | BU X, XU Y, ZHAO M, et al.. Simultaneous extraction of polysaccharides and polyphenols from blackcurrant fruits: comparison between response surface methodology and artificial neural networks [J/OL]. Ind. Crops Prod., 2021, 170: 113682 [2024-01-13]. . |
| [26] | 杨菊.基于扩展有限元法和离散元法的土壤—耕具接触研究[D].昆明:昆明理工大学,2014. |
| YANG J. Analysis of soil-tool interaction using extended finite element method and discrete element method [D]. Kunming: Kunming University of Science and Technology, 2014. | |
| [27] | GAMMOUDI N, MABROUK M, BOUHEMDA T, et al.. Modeling and optimization of capsaicin extraction from Capsicum annuum L. using response surface methodology (RSM), artificial neural network (ANN), and Simulink simulation [J/OL]. Ind. Crops Prod., 2021, 171: 113869 [2024-01-13]. . |
| [28] | 张曦予,李锐定,莫明规,等.基于人工神经网络耦联遗传算法(BP-GA)优化干酪乳杆菌LTL1361冻干保护剂配方[J].食品工业科技,2022,43(21):175-184. |
| ZHANG X Y, LI R D, MO M G, et al.. Optimization of lyophilized protective agent formulation of Lactobacillus casei LTL1361 based on artificial neural network coupled genetic algorithm (BP-GA) [J]. Sci. Technol. Food Ind., 2022, 43(21): 175-184. | |
| [29] | 李俊伟,佟金,胡斌,等.不同含水率黏重黑土与触土部件互作的离散元仿真参数标定[J].农业工程学报, 2019, 35(6): 130-140. |
| LI J W, TONG J, HU B, et al.. Calibration of parameters of interaction between clayey black soil with different moisture content and soil-engaging component in NorthEast China [J]. Trans. Chin. Soc. Agric. Eng., 2019, 35(6): 130-140. |
| [1] | Xiaobo XI, Jieyuan DING, Wendi ZHANG, Yangjie SHI, Yifu JIN, Ruihong ZHANG. Design and Experiment of Orchard Obstacle Avoidance Weeding Cultivator [J]. Journal of Agricultural Science and Technology, 2025, 27(7): 101-110. |
| [2] | Shuoshuo FU, Weiyong GONG, Yixuan LIN, Yuanshun LI, Chengcan LIU, Lin NI. Optimization of Extraction Technology and Antifungal Activity of Total Diterpene from Fokienia Hodginsii [J]. Journal of Agricultural Science and Technology, 2025, 27(5): 146-155. |
| [3] | Chunlin MIAO, Huanhuan XU, Ziyi JIA, Aimin HE, Yangyang JI, Dehua MOU, Shan GAO. Oxidation Resistance Analysis and Component Identification of Distracted Wood Water Extracts [J]. Journal of Agricultural Science and Technology, 2025, 27(5): 182-192. |
| [4] | Jing XU, Han LI, Pinglu CHEN, Jiangni LUO, Chenglu TANG, Muhua LIU. Calibration and Validation of Discrete Element Model for Camelliaoleifera Seed Meal [J]. Journal of Agricultural Science and Technology, 2025, 27(3): 112-121. |
| [5] | Changlong FENG, Chenyang NING, Yixin ZHU, Shuping LI, Chunguang HUANG. Research on Design and Optimization of Ring Winding Mechanism for Trunk Bandages [J]. Journal of Agricultural Science and Technology, 2025, 27(3): 122-132. |
| [6] | Ruyan ZHANG, Shenhao LI, Qipeng ZHU, Taigang FENG, Hongbo LI, Zebing XING, Yu XIAN. Effect of Biochar Content on Physical and Mechanical Properties of Garden Greening Waste/polylactic Acid Composites [J]. Journal of Agricultural Science and Technology, 2025, 27(2): 192-200. |
| [7] | Changlong FENG, Chunguang HUANG, Chenyang NING, Shuping LI, Kejin CHEN. Optimization of Performance and Characteristics of Spiral Drill Bit Excavation Mechanism for Planting Machine [J]. Journal of Agricultural Science and Technology, 2025, 27(2): 89-98. |
| [8] | Xiangzhou TIAN, Fuqiang HE, Fajiang CHEN, Luxin ZHAN. Calibration of Discrete Elemental Parameters of Wood Powder with Different Moisture Content Based on Angle of Repose [J]. Journal of Agricultural Science and Technology, 2025, 27(1): 118-128. |
| [9] | Xue WANG, Xing ZHENG, Jiamiao REN, Yazhou ZHAO, Wenjun PENG. Optimization of Extraction Conditions for Volatile Components in Jujube Honey Based on Plackett-Burman Design and Response Surface Method [J]. Journal of Agricultural Science and Technology, 2025, 27(1): 181-192. |
| [10] | Jingyi XI, Shuangqing WANG, Yitong BAI, Xiuli YAO, Bixuan HUANG, Qingyi LI, Liqing FAN, Shichen HUANG, Mingguo SUN. Study on Optimization of Processing Parameters Using Hermetia illucens Larva to Treat Food Waste by Response Surface Methodology [J]. Journal of Agricultural Science and Technology, 2025, 27(1): 241-249. |
| [11] | Guoqiang DUN, Lei WANG, Xinxin JI, Xinbo JIANG, Yu ZHAO, Na GUO. Calibration and Verification of Discrete Element Parameters of Jinxiang Purple Garlic Seeds [J]. Journal of Agricultural Science and Technology, 2024, 26(8): 131-139. |
| [12] | Lijun FU, Xiaoyu LIN, Jianhua LIN, Huinan SHEN, Yongzhen WU. Research on Processing Technology and Shelf Life of Red Matsutake Beef Sauce [J]. Journal of Agricultural Science and Technology, 2024, 26(6): 148-158. |
| [13] | Guoqiang DUN, Xingpeng WU, Xinxin JI, Fuli ZHANG, Wenyi JI, Yongzhen YANG. Simulation and Optimization of Soybean Plot Metering Device with Double Swing Plate [J]. Journal of Agricultural Science and Technology, 2024, 26(6): 82-90. |
| [14] | Lanxiong ZHANG, Wei ZHENG, Yuan’an CHEN, Jing SHEN, Shuangquan ZOU, Jianrong WU, Lin NI. Study on Extraction Process and Antibacterial Activity of Lignans from Cinnamomum camphora Leaves [J]. Journal of Agricultural Science and Technology, 2024, 26(5): 138-147. |
| [15] | Dongling LIU, Hao SI, Baojiang ZHENG, Yuhong ZHANG. Optimization of Enzyme Assisted-ultrasonic Extraction of Sinigrin in Thlaspi arvense Seeds by Response Surface Methodology [J]. Journal of Agricultural Science and Technology, 2024, 26(4): 225-233. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
 京公网安备11010802021197号
京公网安备11010802021197号